開始使用
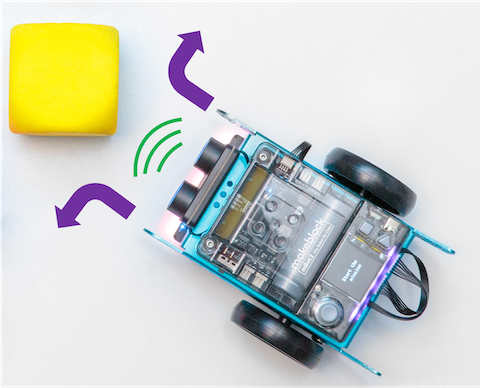
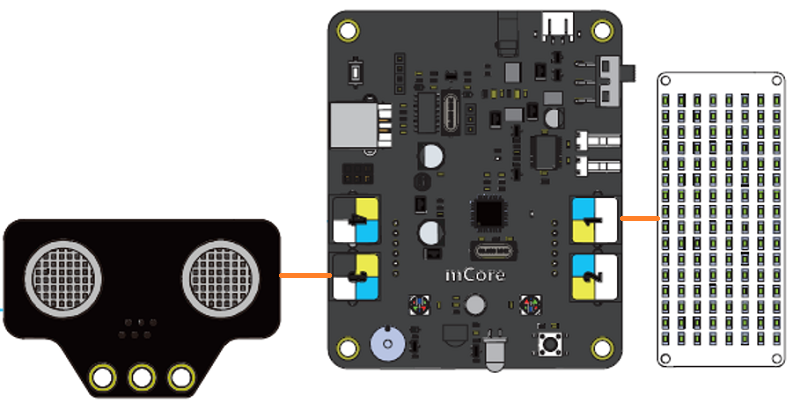
這次我們使用到超聲波感測器、LED面板、馬達,來達成智能避障小車。
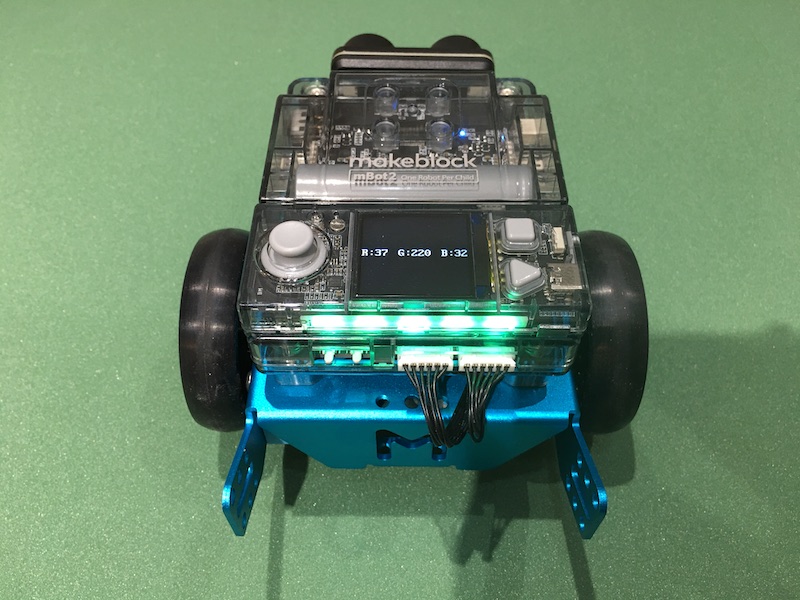
由於mBot本身無內建顯示螢幕裝置,當我們需要得到數值時,需要額外擴充LED面板。
(文章結尾處有購買連結)
開始編程
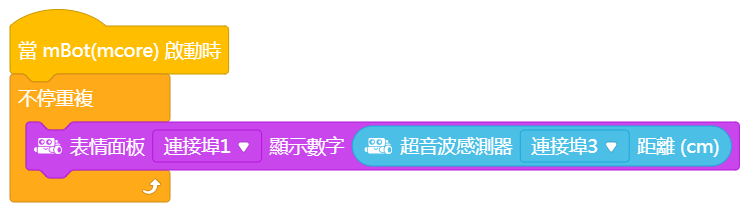
1.超聲波感測器偵測mBot與障礙物之間的距離,並將距離顯示LED面板上。
找牆壁試看看,障礙物與您之間的距離,另外偵測距離規格(2~400cm),0~2cm為盲點。
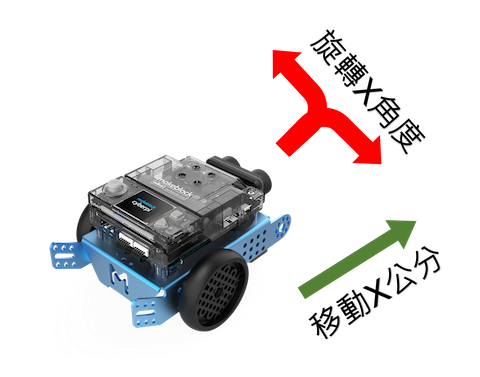
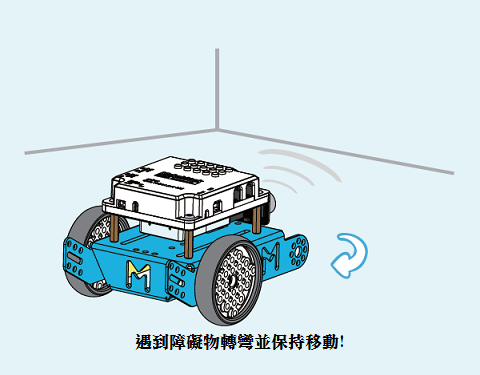
2.範例中我們設定mBot與牆壁距離10公分就轉彎並保持持續移動。
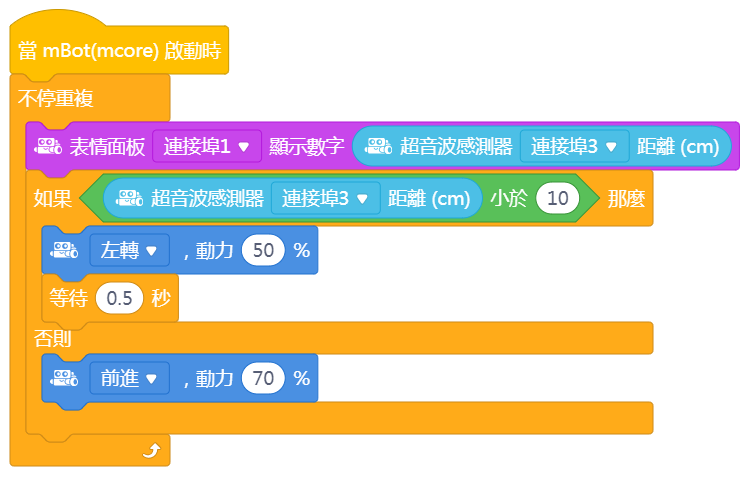
3.程式上傳至mBot後,是否能達成智能避障小車呢。
(試看看更改”等待秒數”和”移動的動力”會有不一樣的行為喔)
▼購買mBot:
▼購買 LED面板: