在前面文章介紹四路循線感測器的規格及如何校正詳細文章請參考:請點我。
循線快速校正請看下方影片:
- 將循線感測器放在白色背景上。
- 連續點擊兩次按鈕(藍燈開始閃爍)。
- 將小車來回滑過黑線。
- 檢查L1、R1在黑線上藍燈是否消失了。
開始編程
(1)擴充mbot2 功能,點選”延伸集+”。

(2)點選”設備擴展” -> 點選”下載圖示” -> 點選”+添加”。

(3) 將編程模式設置為上傳。

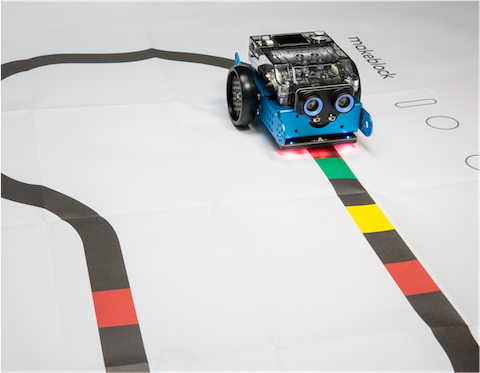
Mbot2延者線做循線功能。
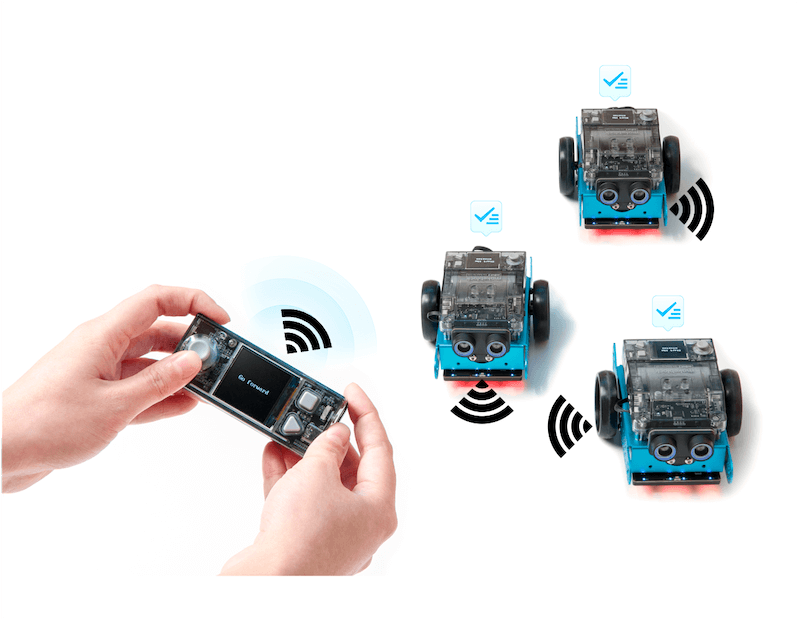
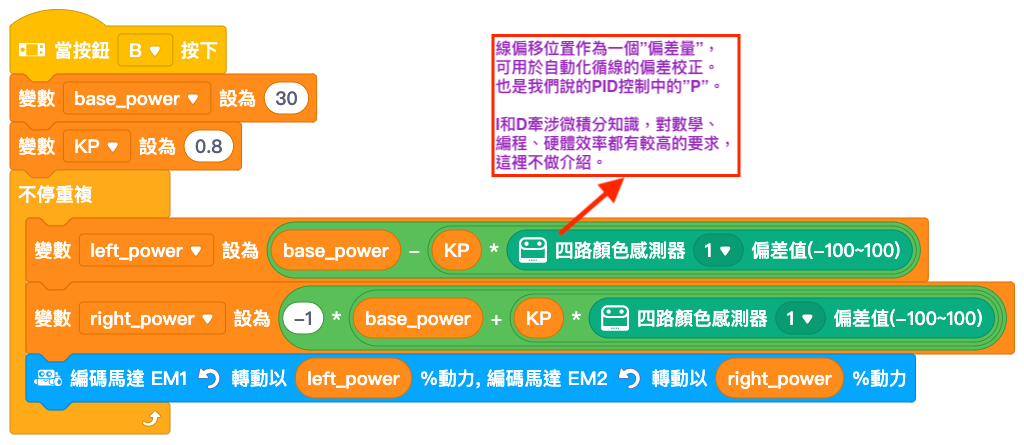
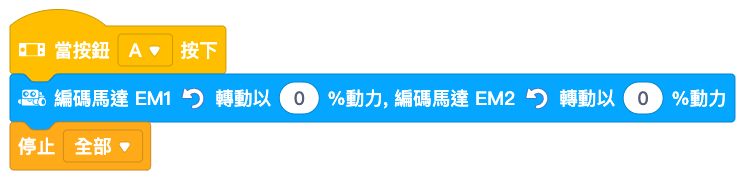
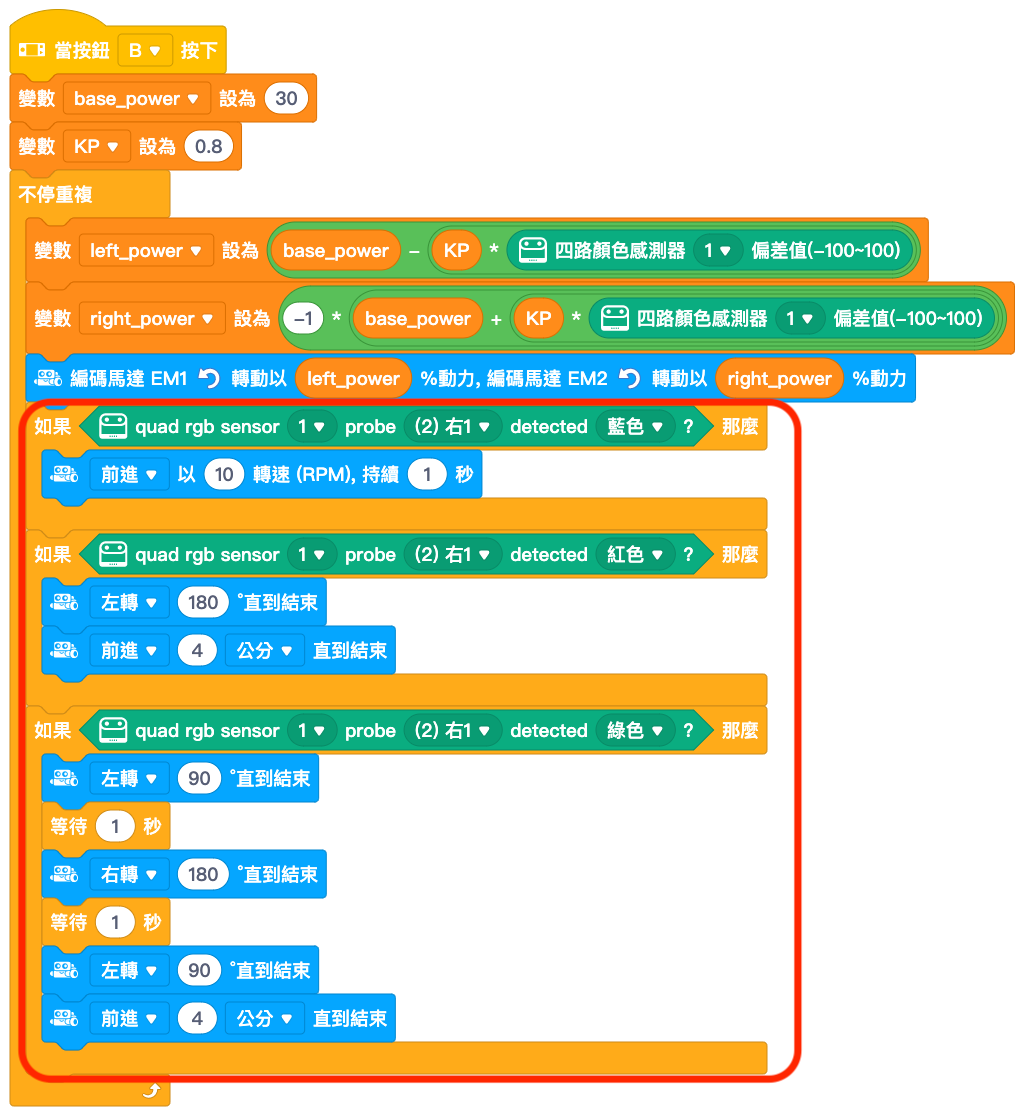
- 按下按鍵B啟動循線模式,按下按鍵A停止程式。
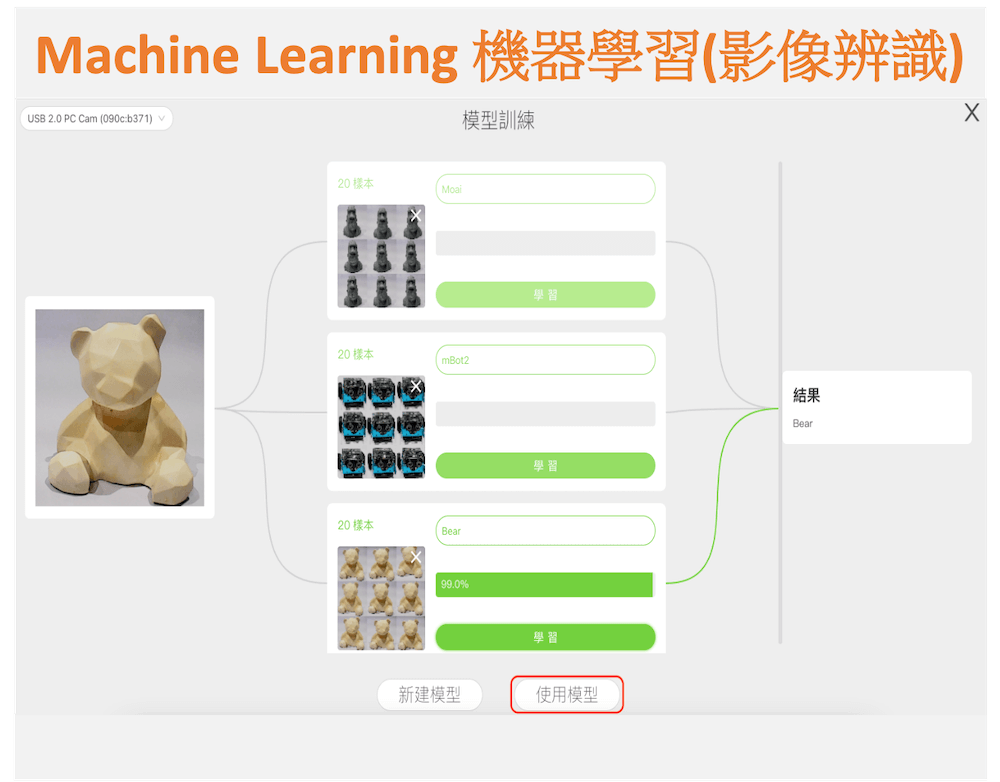
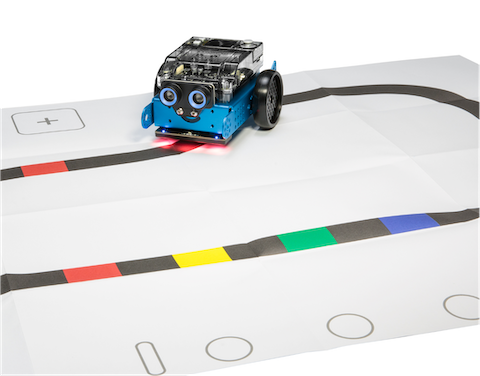
添加顏色辨識,藍、紅、綠對應不同動作,新增顏色辨識程式於按鈕B下。
- 辨識藍色:10RPM轉速前進1秒。
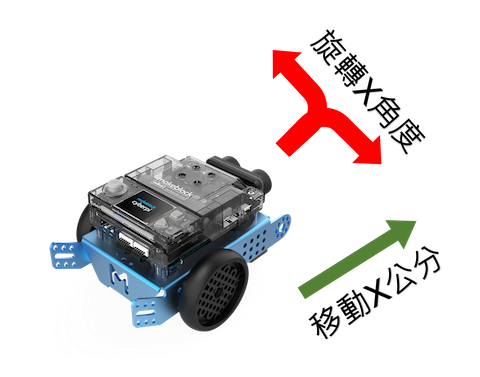
- 辨識紅色:左轉180度後前進4CM。
- 辨識綠色:左轉90度後,右轉180度在左轉90度,往前4CM。
注意:若顏色辨識不準可長按循線感測器上的按鍵來切換補光燈顏色。
(5) 上傳程式