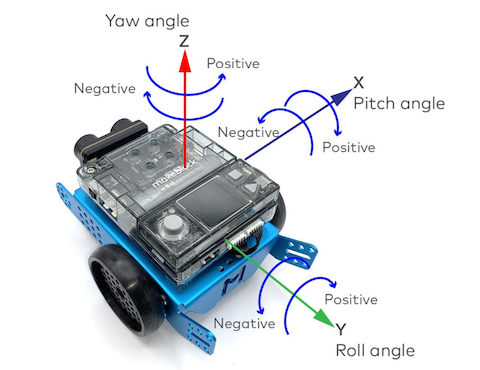
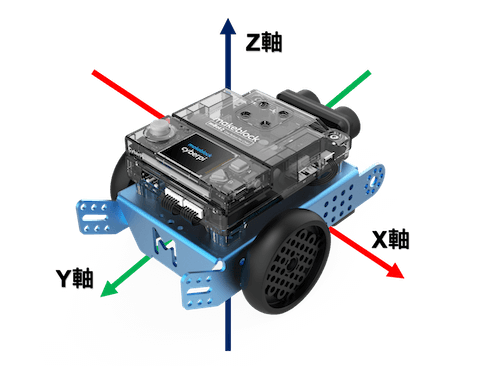
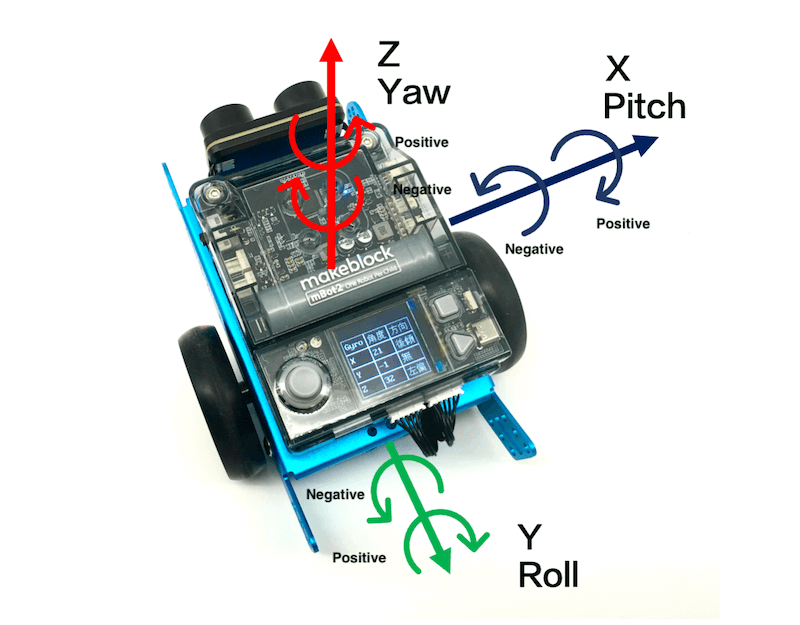
IMU是測量物體三軸角速率,可分為三軸陀螺儀和三個方向的加速度計也稱為六軸感測器。
在前面兩篇各別介紹了陀螺儀和加速度計,相信看完前面兩篇後我們可以更快速了解本篇。
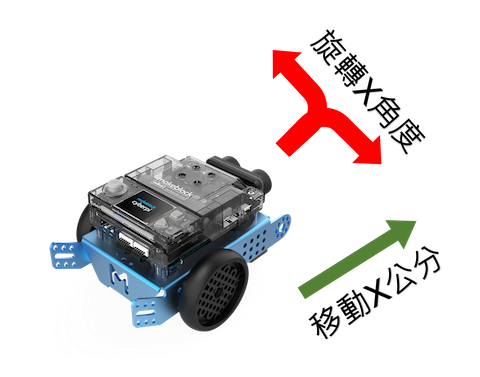
六軸感測器的單位是°/S,5°/S意思為 每秒鐘旋轉5度。
開始編程
(1) 將編程模式設置為上傳。

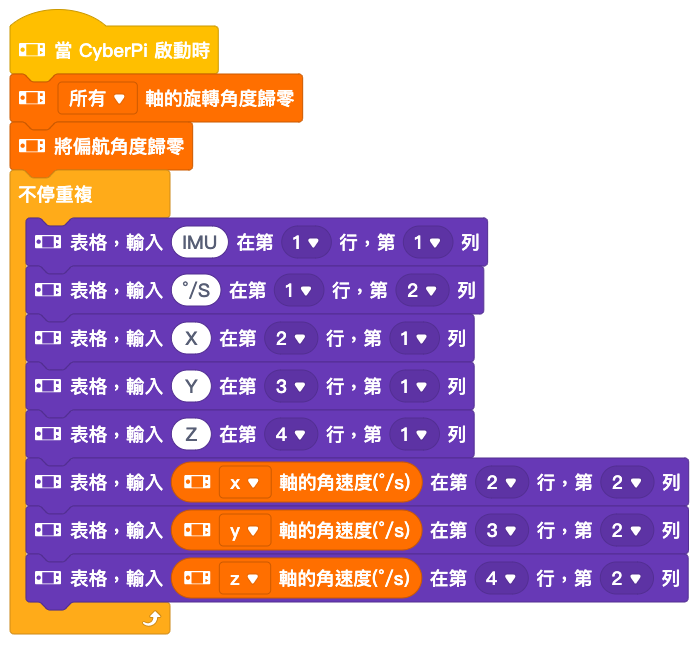
(2) 編寫程式
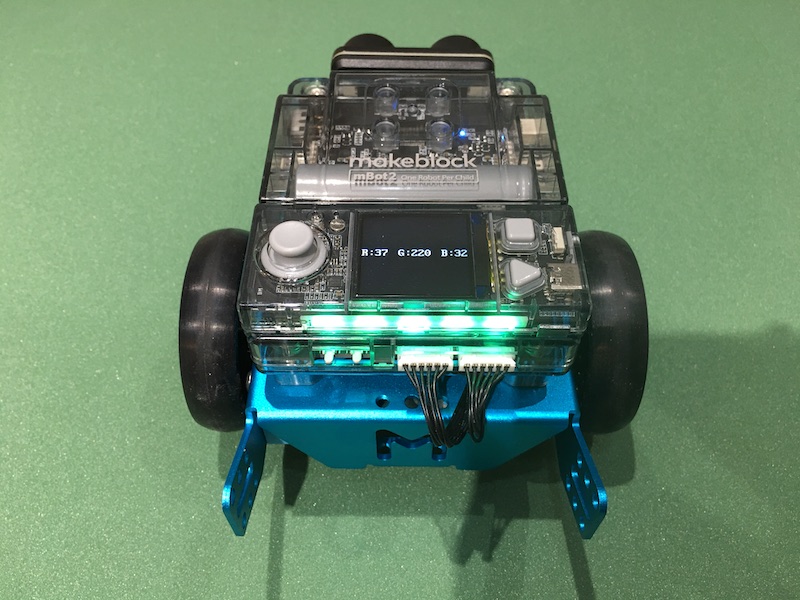
建立表格,將IMU讀取出來的角速度顯示在螢幕上。
加速及減速旋轉看看角速度是多少呢?
(5) 上傳程式

IMU是測量物體三軸角速率,可分為三軸陀螺儀和三個方向的加速度計也稱為六軸感測器。
在前面兩篇各別介紹了陀螺儀和加速度計,相信看完前面兩篇後我們可以更快速了解本篇。
六軸感測器的單位是°/S,5°/S意思為 每秒鐘旋轉5度。
(1) 將編程模式設置為上傳。
(2) 編寫程式
建立表格,將IMU讀取出來的角速度顯示在螢幕上。
加速及減速旋轉看看角速度是多少呢?
(5) 上傳程式
陀螺儀(Gyroscope)測量傾斜運動,更準確地說是測量傾斜角度。陀螺儀的裝置,一直是航空和航海上航行姿態及速率等最方便實用的參考儀錶,近期更是大量運用在各種電子產品設備上。如:導彈、智慧手機、智慧手錶、汽車、導航..等等。
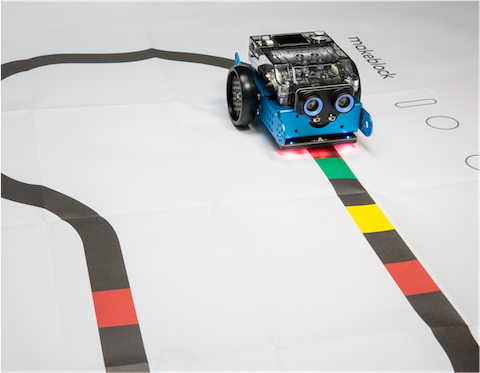
循線快速校正請看下方影片:
1.將循線感測器放在白色背景上。
2.連續點擊兩次按鈕(藍燈開始閃爍)。
3.將小車來回滑過黑線。
4.檢查L1、R1在黑線上藍燈是否消失了。
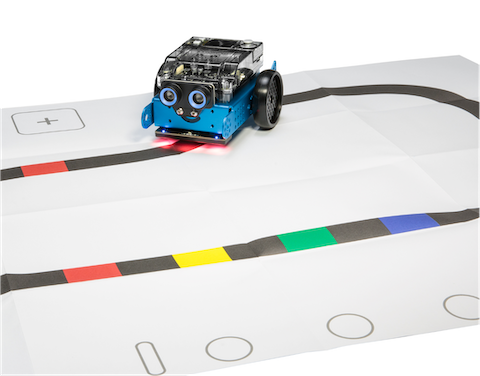
透過光反射原理當光感測器接收到不同光線時會有不同的對應的值,我們就可以應用於循線,以產品所附的地圖來說,循線是黑線所以光會被吸收,線徑的寬較小所以只需要用到L1、R1。
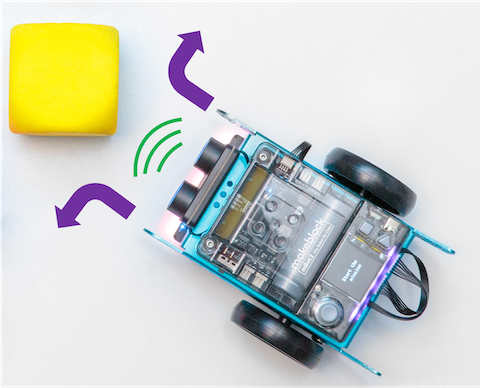
在前面文章中我們介紹了mbot2所使用的新款超聲波感測器具有偵測距離外還多了視覺表達功能,我們將這兩種功能應用在避障機器人上。

180 光學編碼馬達配備了光學編碼器,可實現高精度控制,通過它們的旋轉、速度和位置進行精確控制,從而使數學、物理和工程原理的集成。可靈活搭配其他各種零件使用。 它使用的材料降低了噪音並保證了大的輸出扭矩。

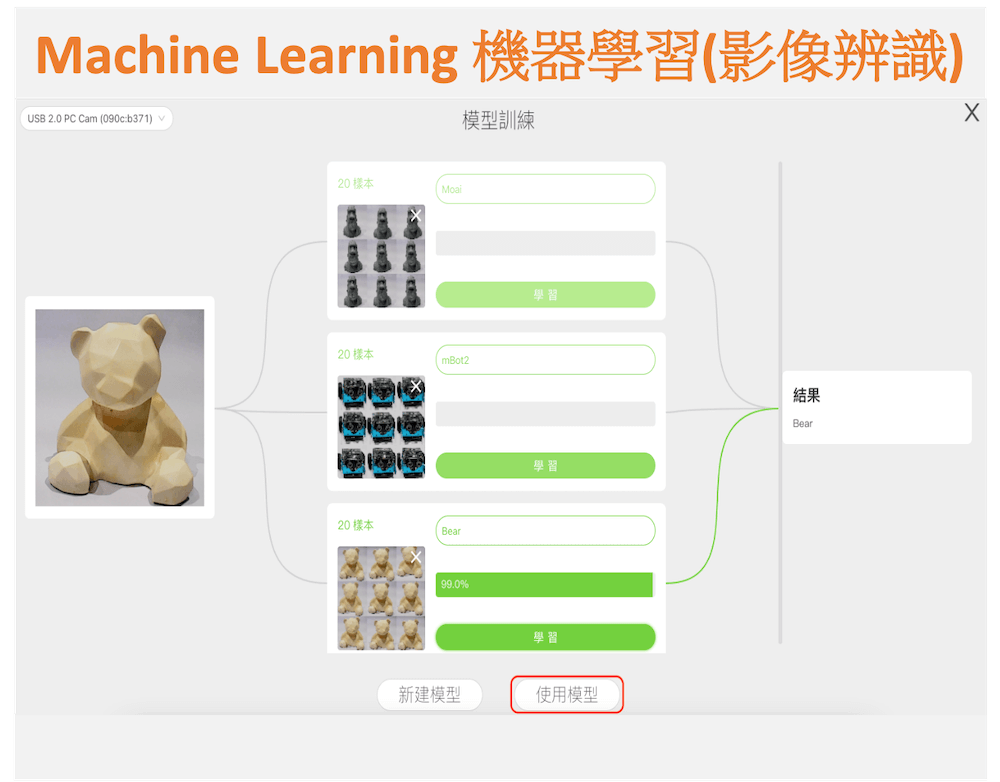
使用人工智慧的語音辨識功能,來製作有趣的玩法,CyberPi板上集成麥克風功能,我們對者CyberPi 說出指定關鍵句,CyberPi判斷成功也回應您相關語句。
©2025 Copyrights 米羅科技文創學院 All Rights Reserved | 網站系統建置 By SGI
