陀螺儀(Gyroscope)測量傾斜運動,更準確地說是測量傾斜角度。陀螺儀的裝置,一直是航空和航海上航行姿態及速率等最方便實用的參考儀錶,近期更是大量運用在各種電子產品設備上。如:導彈、智慧手機、智慧手錶、汽車、導航..等等。
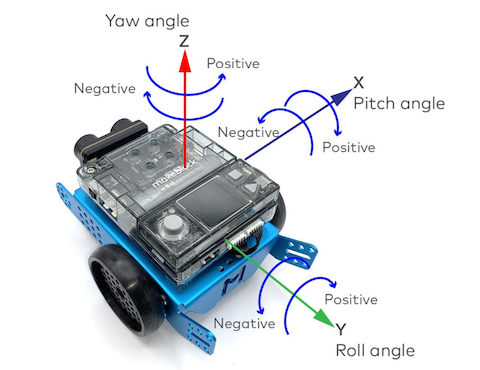
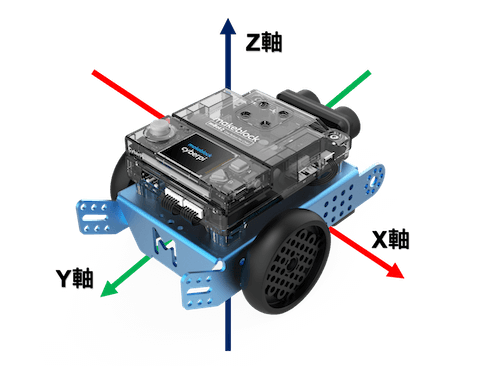
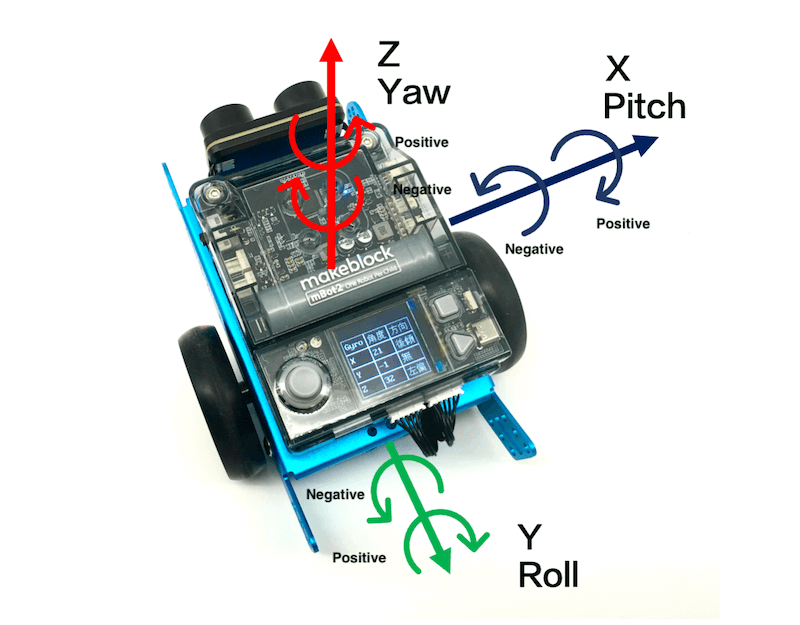
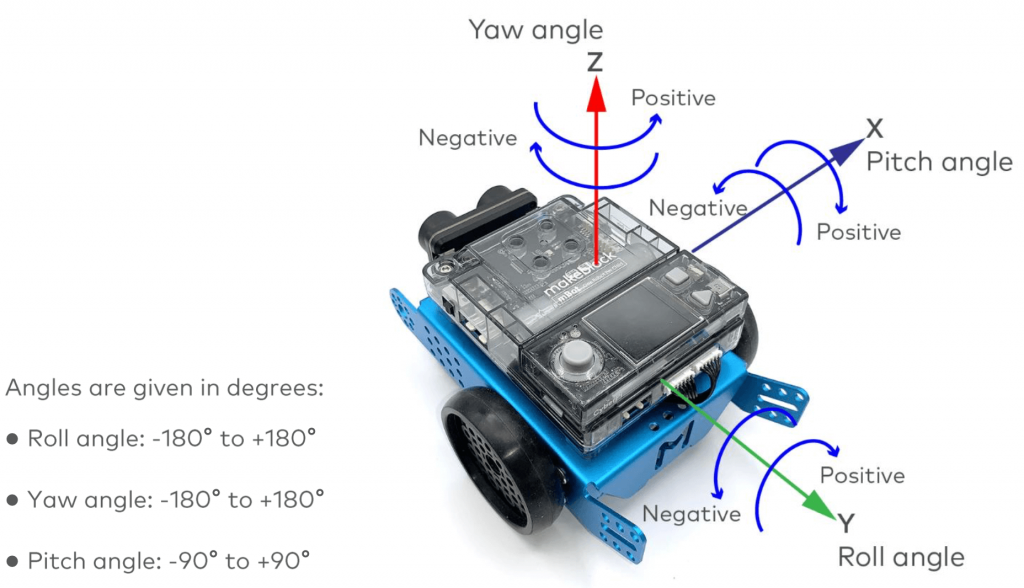
如下圖陀螺儀可以測量出X軸(Pitch)、Y軸(Roll)、Z軸(Yaw)的旋轉角度及判斷旋轉方向。
開始編程
(1) 將編程模式設置為上傳。

(2) 編寫程式
X軸(Pitch)程式,量測角度並判斷傾斜方向。
- 將X軸傾斜角度顯示於螢幕上。
- 若傾斜超過10度,顯示傾斜並顯示方向。
注意:本篇傾斜或偏移狀態設置為10度,可自行修改判斷的傾斜角度。

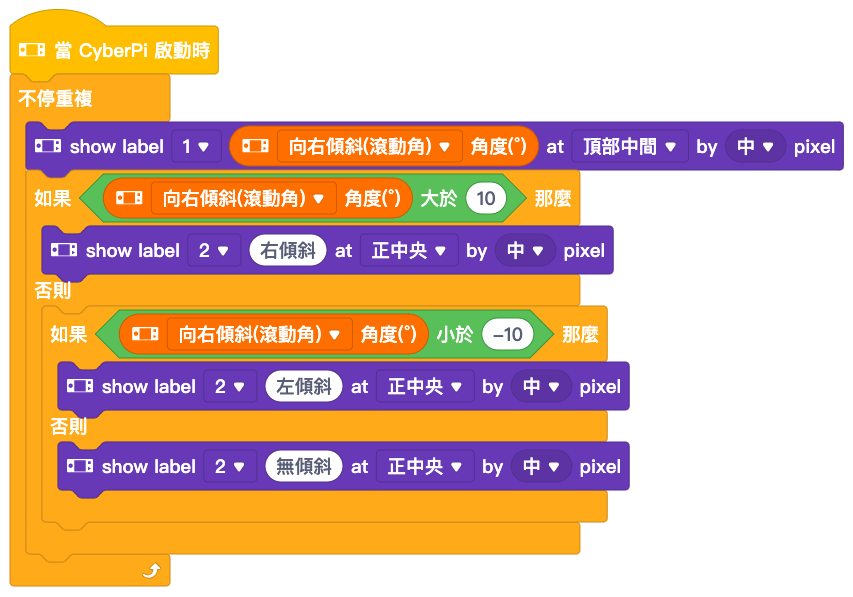
Y軸(Roll)程式,量測角度並判斷傾斜方向。
- 將Y軸傾斜角度顯示於螢幕上。
- 若傾斜超過10度,顯示傾斜並顯示方向。
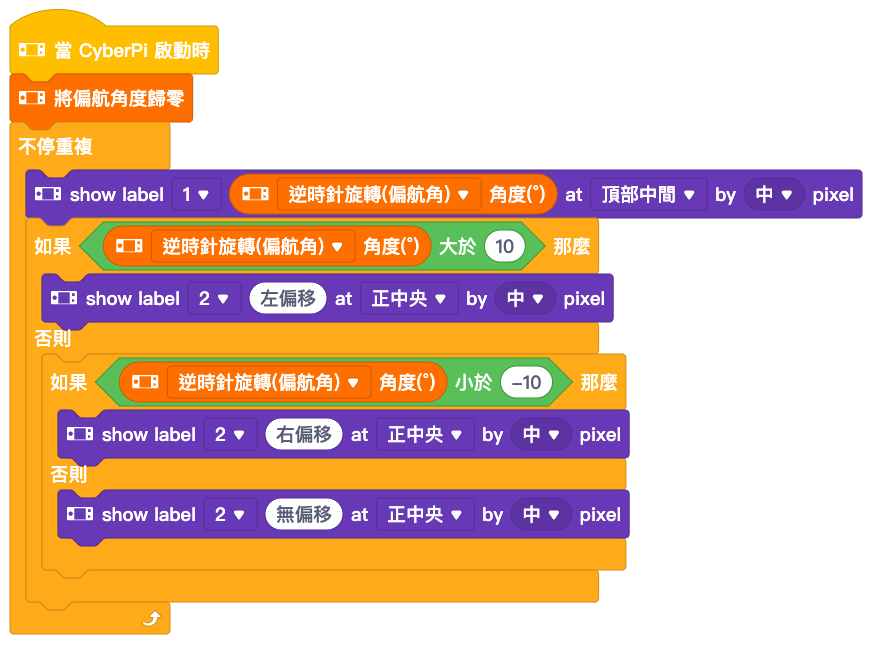
Z軸(Yaw)程式,量測偏移角度並判斷偏移方向。
- 初始化Z軸角度歸零。
- 將Z軸傾斜角度顯示於螢幕上。
- 若傾斜超過10度,顯示傾斜並顯示方向。
將陀螺儀(Gyroscope)三軸X、Y、Z整合在一個程式。
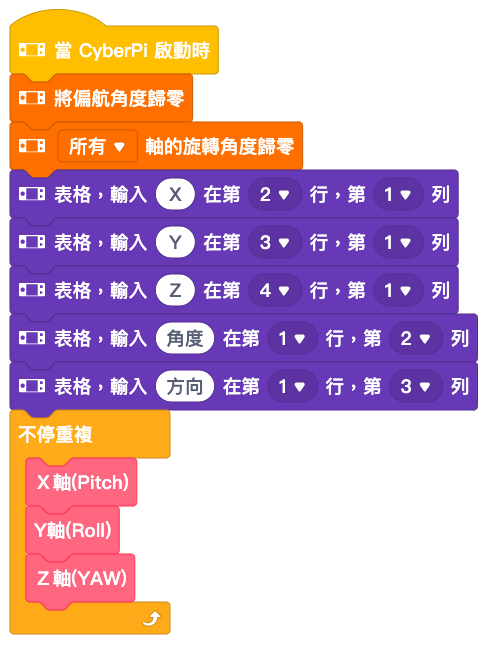



目前小車程式是靜態狀態,試看看加入移動程式和讓mbot2爬斜後的顯示狀態把。
(3) 上傳程式

▼購買mBot2: