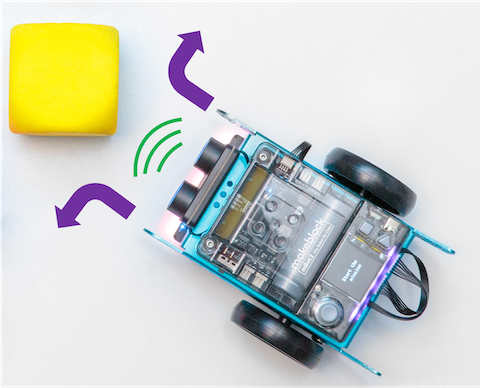
180 光學編碼馬達配備了光學編碼器,可實現高精度控制,通過它們的旋轉、速度和位置進行精確控制,從而使數學、物理和工程原理的集成。可靈活搭配其他各種零件使用。 它使用的材料降低了噪音並保證了大的輸出扭矩。
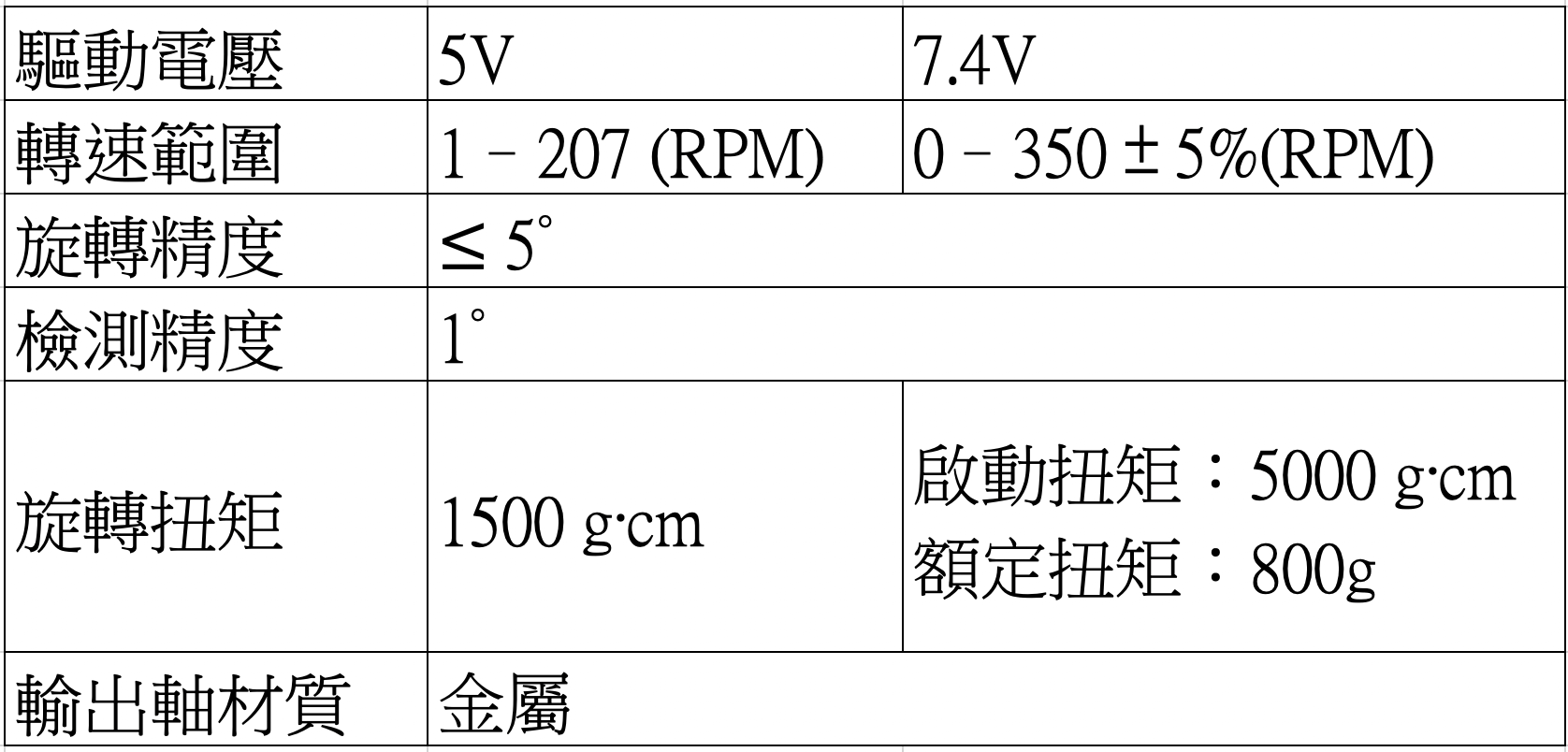
規格
電子特性
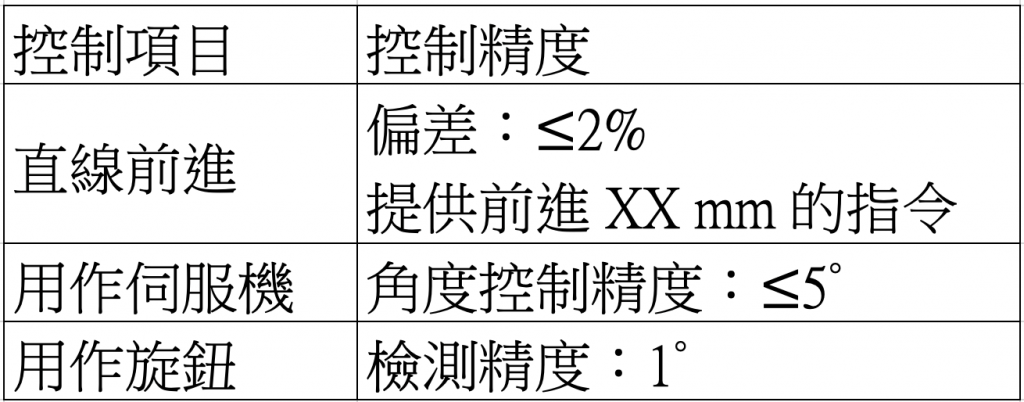
控制能力
開始編程
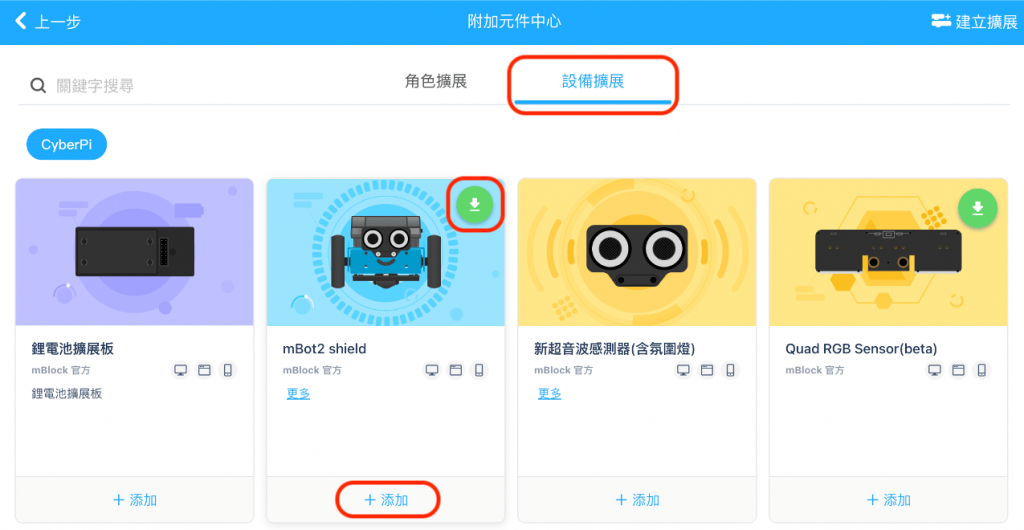
(1)增加mbot2 shield功能,點選”延伸集+”。

(2)點選”設備擴展” -> 點選”下載圖示” -> 點選”+添加”。
(3) 將編程模式設置為上傳。

(4) 編寫程式
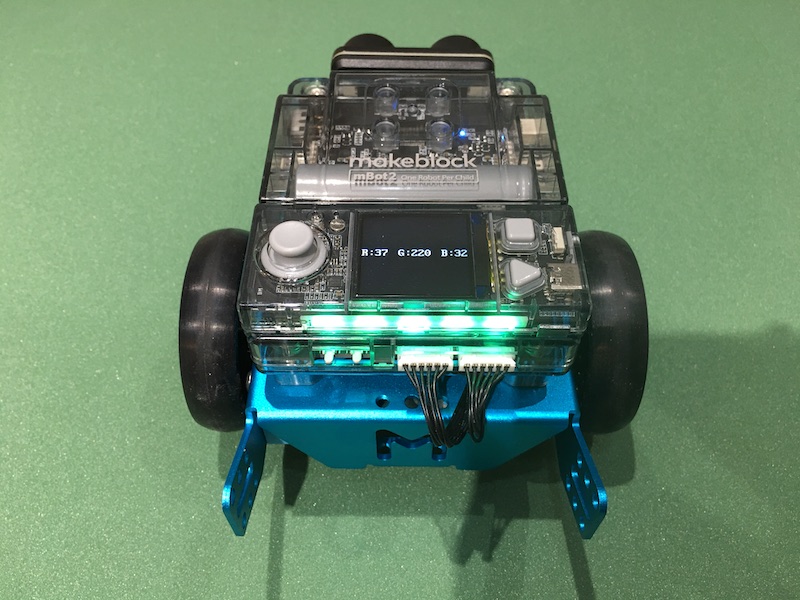
程式1:手動旋轉輪子EM1馬達將讀取到的角度輸出至螢幕,並將值輸出至EM2來控制RPM轉速。
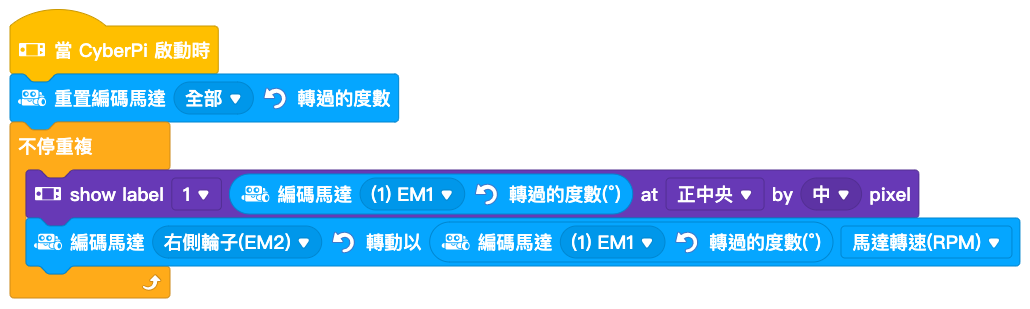
手動旋轉輪子EM1前、後,看看EM2會發生什麼事情呢?
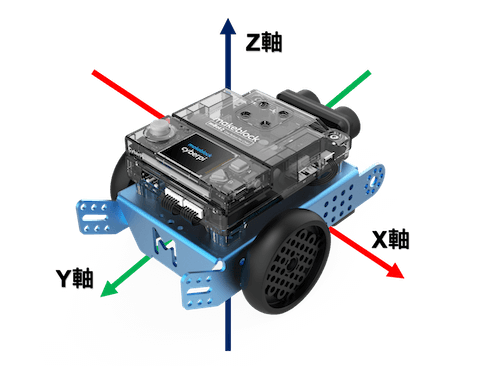
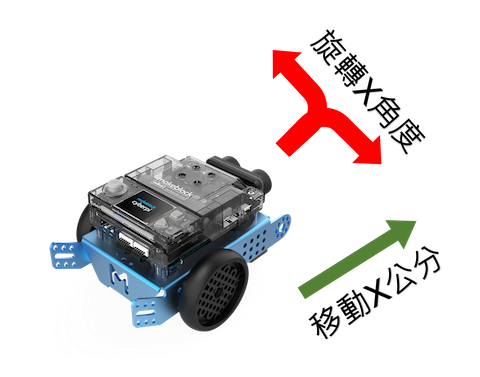
程式2:前進X公分
- 指定mbot2前進X公分。
- 透過搖桿上下來調整mbot2移動公分數。
- 按下按鈕A後mbot2開始移動。
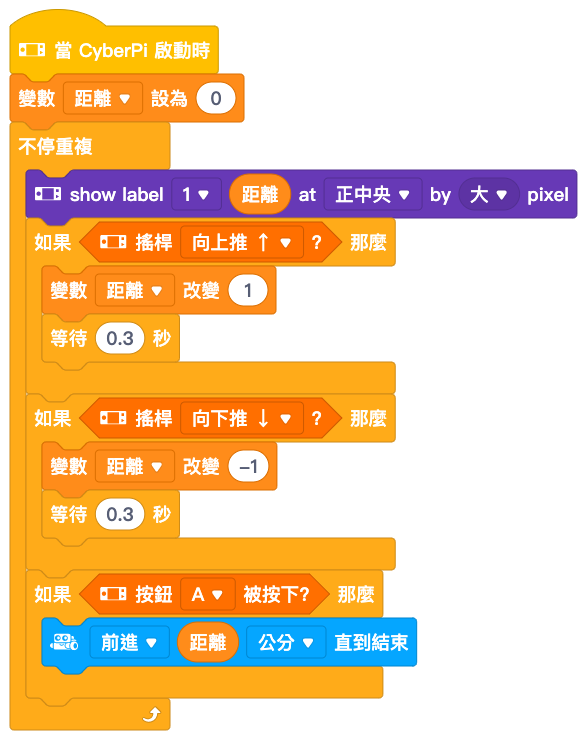
嘗試看看負數值mbot2是怎樣移動的,並用尺量測看距離是對的嗎。
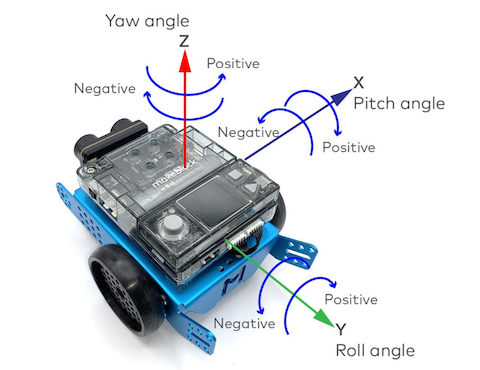
程式3:旋轉X角度
- 指定mbot2旋轉X角度。
- 透過搖桿左右來調整mbot2移動角度。
- 按下按鈕B後mbot2開始旋轉。
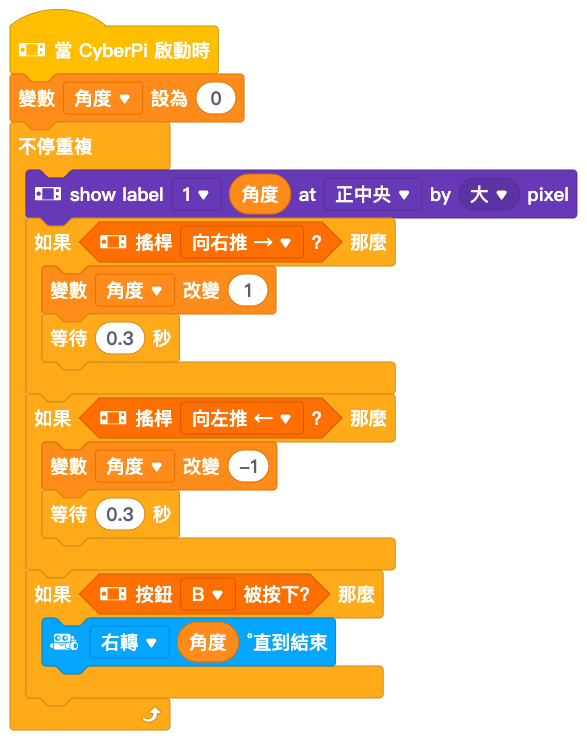
嘗試看看負數角度mbot2是怎樣旋轉的,並用角度尺量測看角度是對的嗎。
(5) 上傳程式

▼購買mBot2: