介紹如何使用在您的PC電腦上的 mBlock5 替 mBot2 編寫簡單的避障程式。
在開始之前,請確保您擁有:

1.下載mBlock5到電腦上安裝
安裝下載方式請參考:
2.連接mBot2到mBlock 5
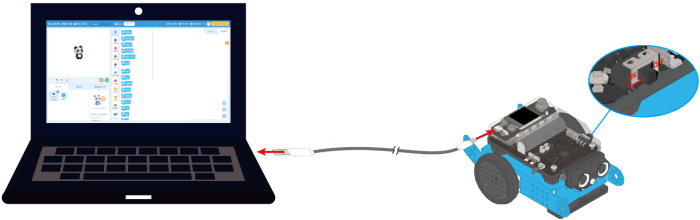
(1) PC上的 mBlock 5 編譯軟體打開。

(2) 使用 USB 傳輸線(Type-C)將 mBot2 連接到您的 PC,然後打開 mBot2。
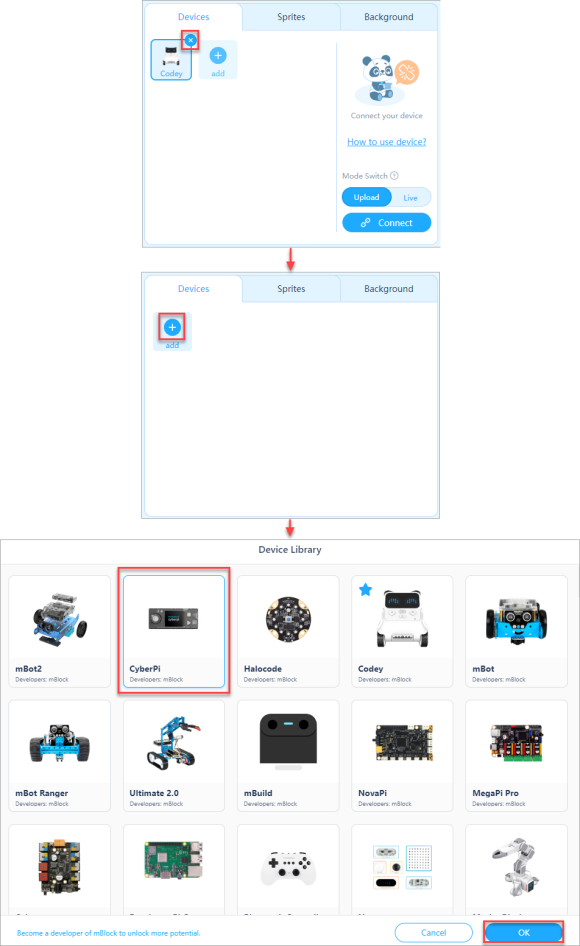
(3) 點擊“設備”選項上的“+添加”,在設備庫中選擇“CyberPi”,點擊“確定”。
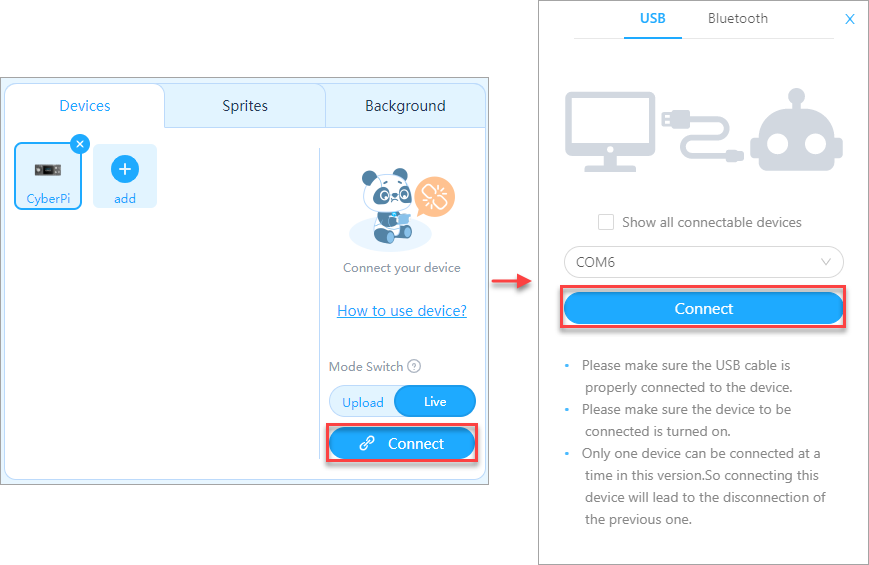
(4) 點擊“連接”將 CyberPi 連接到 mBlock 5。
2.增加避障程式所需的擴展
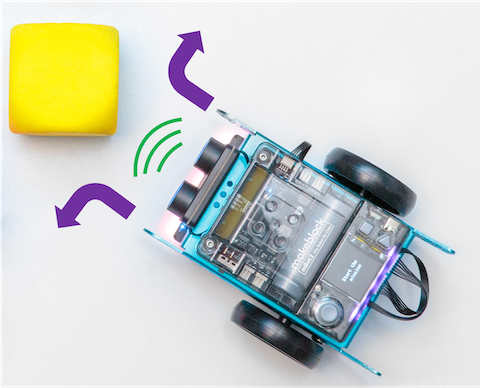
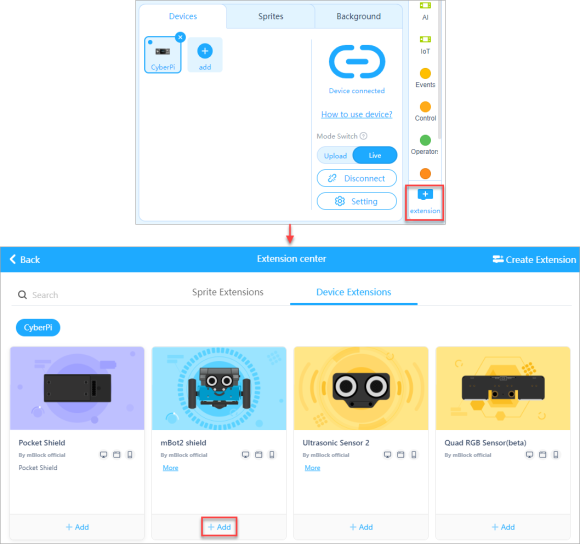
為避開障礙物,mBot2 使用其超聲波傳感器 2 來檢測障礙物,然後通過連接到 mBot2 Shield 的馬達和移動做出對應。 因此,您需要添加 mBot2 和 Ultrasonic Sensor 2 擴展。
(1)添加“mBot2”擴展。
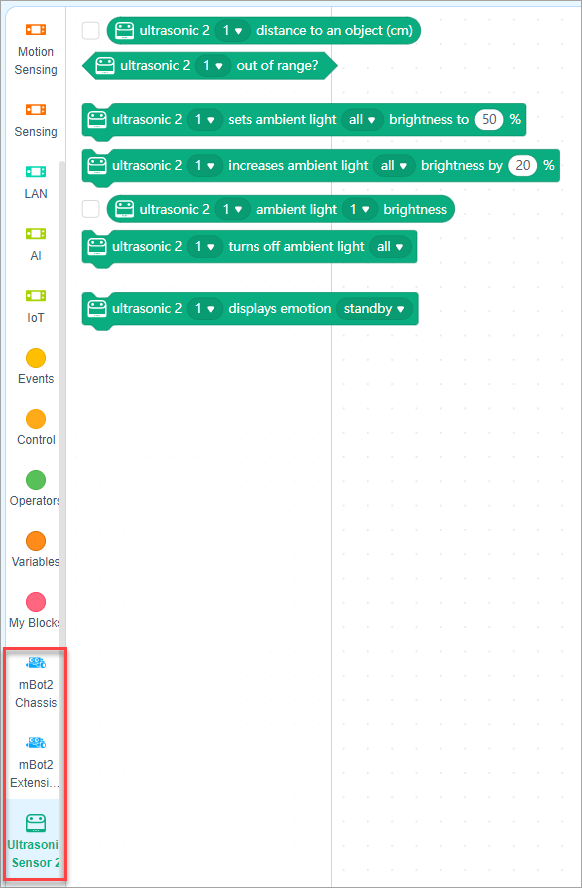
(2) 添加“新超音波感測器(含氣氛燈)”擴展。
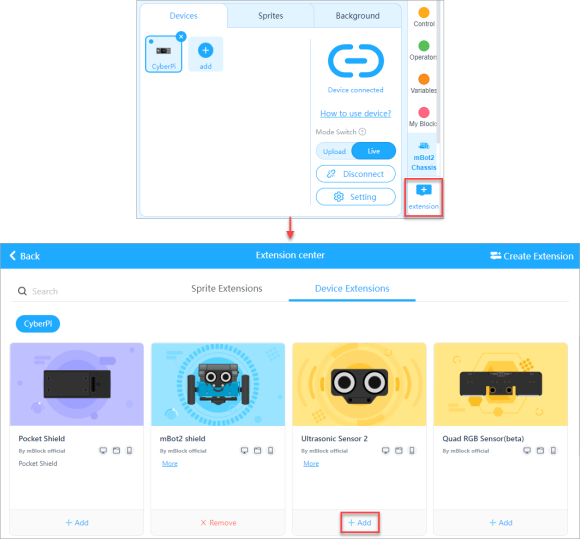
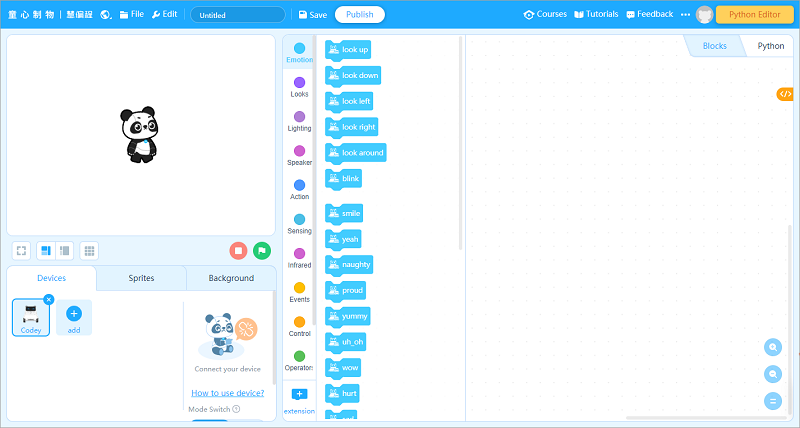
增加擴展後,您可以在積木區找到積木
4.開始編寫程式
注意:您上傳的程式將替換您在 mBot2 上執行的最後一個程式。
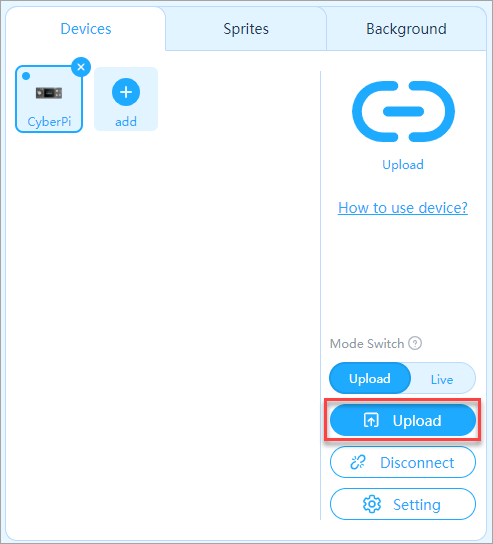
點擊上傳圖標,等待上傳完成,然後點擊確定。
(1)將模式設定為”上傳”
即時:該模式下可以實時查看程序執行效果,方便程式的調整。 在此模式下,必須保持 mBot2 與 mBlock 5 連接,如果斷開,程序將無法執行。
上傳:該模式下,需要將編譯好的程序上傳到mBot2。 上傳成功後,與mBlock 5斷開連接後,程序仍可在mBot2上正常運行。

(2)將所需的積木拖到程式區域。
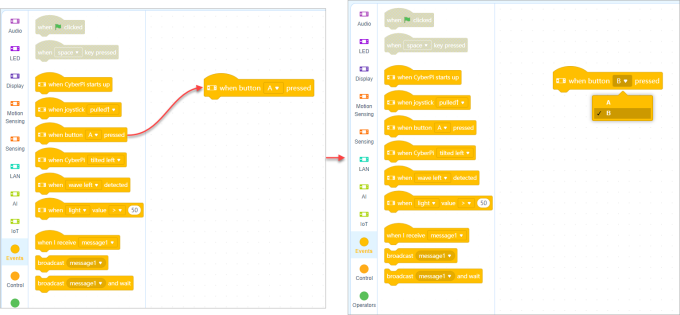
A.首先,定義觸發避障程序執行的事件。 例如,通過按下按鈕 B 來觸發程序。
點擊事件類別,將按下按鈕()時的積木拖到程式區域,然後點擊下拉列表框選擇按鈕B。
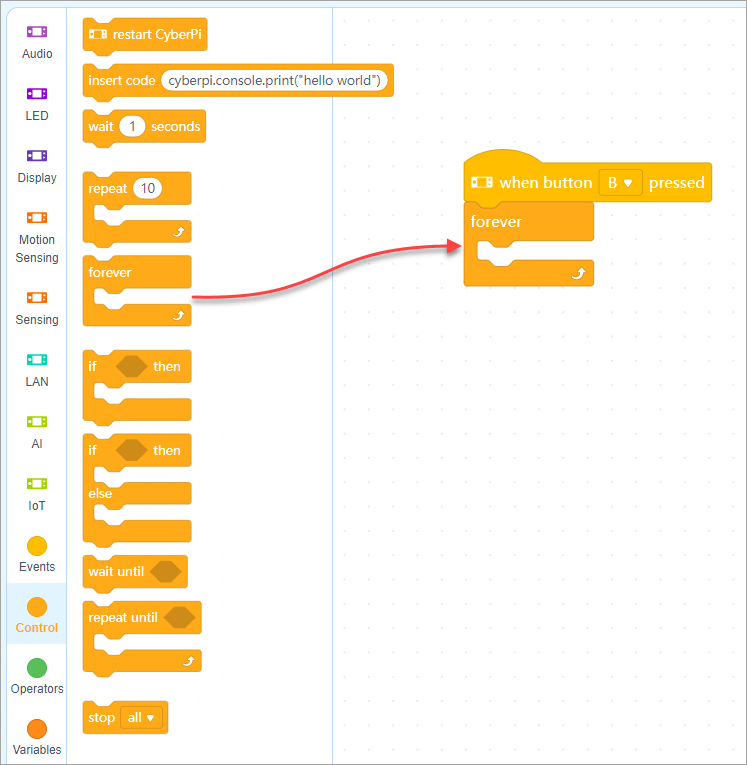
B.定義程序要執行多少次。 例如,程序被觸發後繼續執行。
點擊控制類別並將積木拖到程式區域。
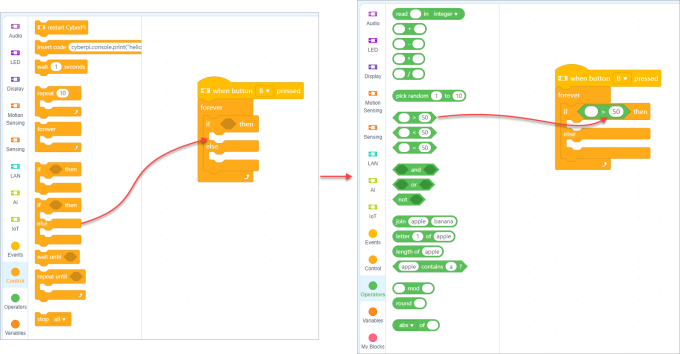
C.定義迴避的條件以及 mBot2 如何應對障礙物。
定義條件
例如,mBot2在距離mBot2 9cm以內時開始避開障礙物; 當沒有發現障礙物或距離障礙物超過9cm時,mBot2會繼續前進。
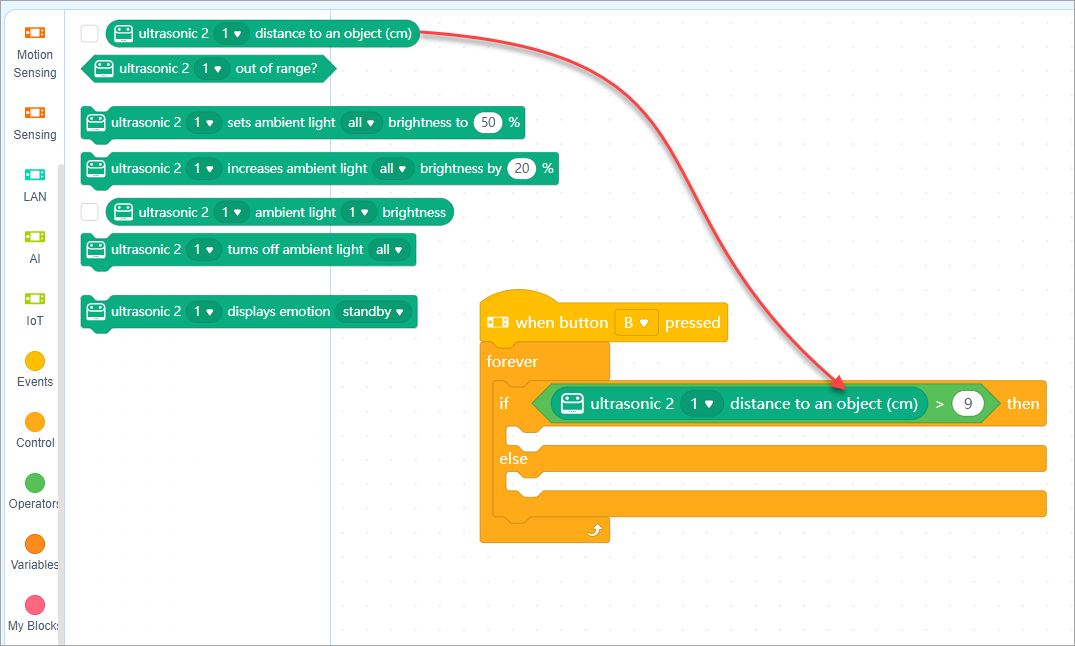
點擊控制類別並將積木 if () then () else () 拖到程式區域。
該條件涉及距離的操作。
點擊運算類別並將積木()>()拖到程式區域並將其放入條件積木中。
點擊 50 將值其更改為 9。
點擊新超音波感測器(含氣氛燈)類別,將新超音波感測器(含氣氛燈)積木()與物體的距離(公分)拖到程式區域並將其放入操作積木中。
定義響應
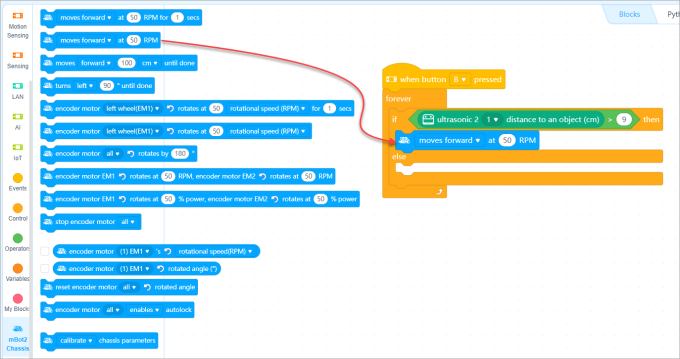
當障礙物距離 mBot2 超過 9cm 時,mBot2 會繼續前進。
點擊 mBot2 Chassis 類別並將積木 () at () RPM 拖到程式區域並將其放入條件積木中。
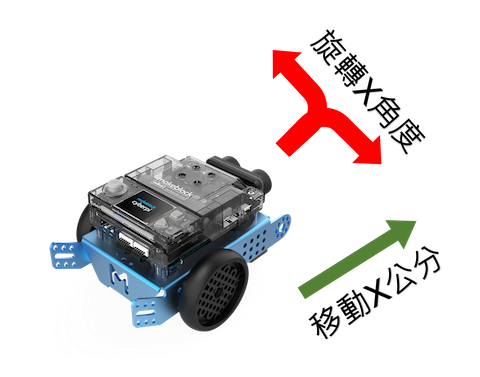
當障礙物距離 mBot2 小於等於 9cm 時,mBot2 向左轉。
將積木 () at () RPM for () secs 拖到程式區域,將其放入條件積木中,然後點擊下拉列表框選擇左轉。
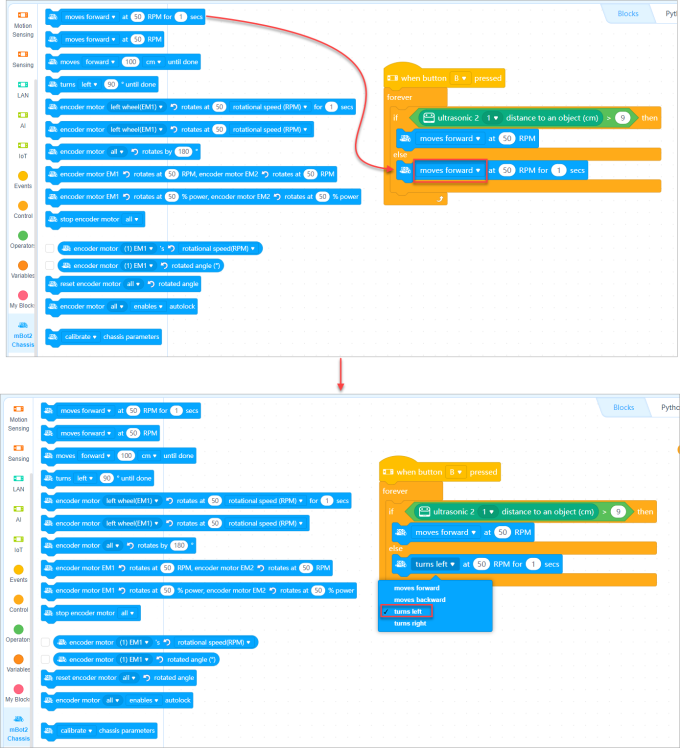
現在,一個簡單的避障程序就完成了。
5.上傳程式至mBot2
注意:您上傳的程序將覆蓋您在 mBot2 上執行的最後一個程序。
點擊上傳,等待上傳完成。
關於程式覆蓋
您可以在 CyberPi 上找到兩個程序類別,即預設和我的程式。 選擇切換程式,然後向左或向右拉操縱桿在它們之間切換。
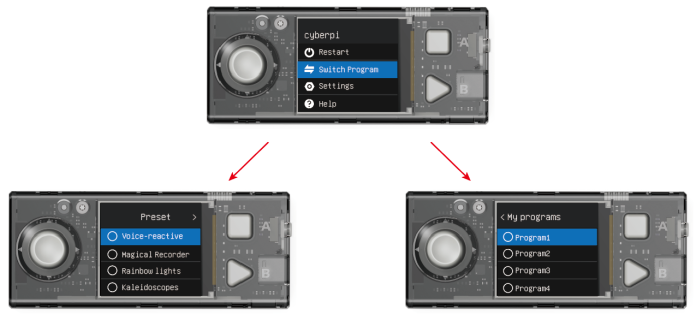
1.如果您在運行預設程序時上傳程式,您上傳的程序會覆蓋我的程序中的 Program1。 您需要進入我的程序才能找到它,並且可以按按鈕 B 來運行它。
2.如果您在“我的程式”中運行程式時上傳程式,則您上傳的程式會覆蓋您正在運行的程式。 例如,您在運行 Program2 時上傳了一個程序,Porgam2 會被您上傳的程序覆蓋。
6.執行程式

mBot2 開始向前移動並檢測障礙物。 當發現障礙物且距離mBot2 9cm以內時,mBot2左轉1秒後向前移動。