概述
四路 RGB 感測器使用可見光作為補光,顯著降低了環境光的干擾。 此外,它還提供了識別顏色的功能。 新的環境光校正功能還減少了環境光對線路跟隨的干擾。 擁有四個光感器,可以支援更多的編程場景。
| 四路 RGB 感測器 | 雙路 RGB 顏色感測器 | |
| 塑料外殼,提高耐用性和質量 | 是 | 否 |
| 巡線感測器 | 4 | 2 |
| 顏色感測器 | 4 (也可用於巡線用) | 否 |
| 光感測器 | 4 (也可用於巡線用) | 否 |
| 補光燈 | 環境可見光 | IR light |
| 環境光校正,降低環境光的干擾 | 是 | 否 |
規格
檢測範圍:距離待檢測物體5-15(mm)。
按鍵敘述
雙擊:當按鈕被雙擊時,四路RGB 感測器開始學習背景和巡線進行線跟隨。
將光感測器放置在沿線軌跡圖的背景上,然後雙擊按鈕。 當您看到指示線路追踪狀態的 LED 快速閃爍時,請在背景和線路上方左右搖晃感測器,直到 LED 停止閃爍。 大約需要 2.5 秒。 自動存儲獲得的參數值。 如果學習失敗,指示燈會慢閃,需要重新開始學習。
長按:長按按鈕時,四路 RGB 感測器切換補光燈的顏色。 一般來說,你不需要改變顏色。 學習完成後自動設置顏色。
編程指示
您可以使用 mBlock 5 對四通道 RGB 感器進行編程。
將 quad RGB 傳感器連接到 CyberPi,添加 CyberPi 並將其連接到 mBlock 5,然後添加 Quad RGB Sensor 擴展。
設置檢測模式
可以對四通道 RGB 傳感器進行編程以檢測以下任一情況:
- 顏色
- 灰階
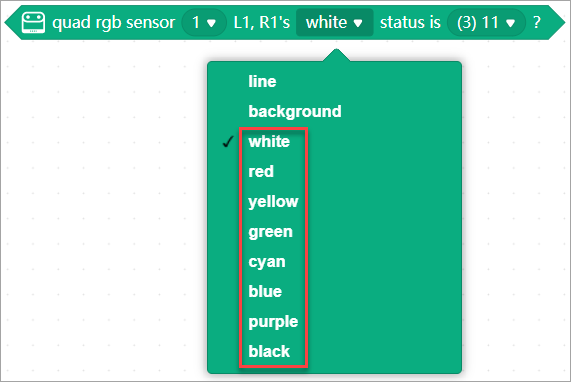
對於顏色檢測,四通道 RGB 感測器根據物體的紅色、綠色和藍色 (RGB) 值測量物體反射的光。 有八種顏色可供選擇。
要檢測顏色,您需要在要使用的積木中選擇一種顏色,例如:
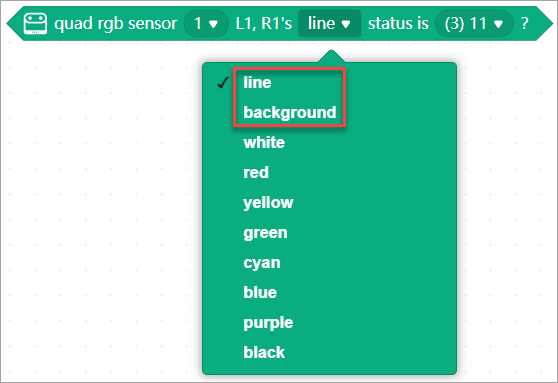
對於灰階檢測,四通道 RGB 傳感器測量物體反射的光強度,無論其顏色如何。
要檢測灰階,需要在要使用的積木中選擇線條或背景,例如:
獲取輸出值
Quad RGB 感測器可以根據它檢測到的顏色或灰階輸出值,您可以使用積木獲取這些值,例如:

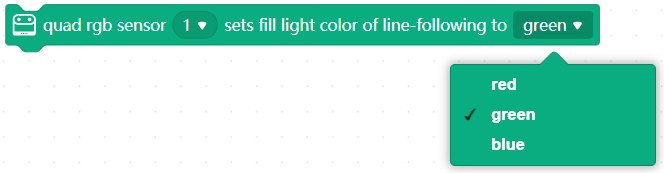
更改補光燈的顏色
您可以透過長按按鈕或使用積木選擇在綠色、紅色和藍色之間更改補光燈的顏色:
注意:Quad RGB 感測器可以檢測顏色,無論補光燈是什麼顏色。
在某些應用場景中需要改變補光燈的顏色。 詳見下方“線路檢測場景”。
線路檢測場景
在使用Quad RGB 感測器檢測線條之前,您需要對其進行基本校正。
基本校準
- 將感測器放在背景上,雙擊傳感器上的按鈕,然後在線上和背景上水平滑動感測器。
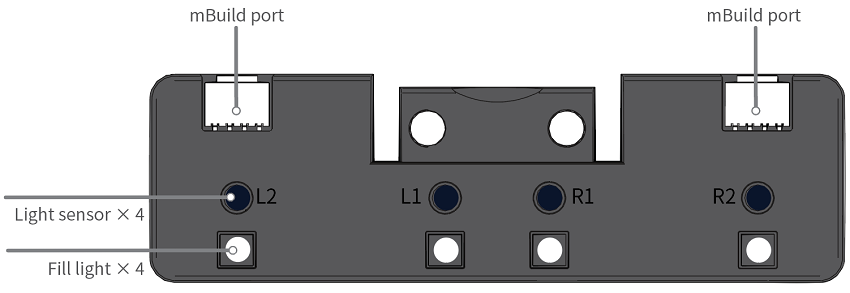
- 檢查中間的兩個光感測器(L1 和 R1)。 如果機器人在線,則兩個光感測器的藍色 LED 都應該熄滅。 當您將機器人劃過線時,兩個 LED 會交替打開和關閉。
提示:Quad RGB 感測器可以檢測淺色背景上的暗線,無論照明顏色如何。
以下描述了多種線路檢測場景,以及針對每種場景推薦的積木和設置。
場景1:黑線+白邊+白底
例如:
對Quad RGB 感測器進行基本校正,使其能夠識別線和背景。
| 等級 | 推薦的積木 | 備註 |
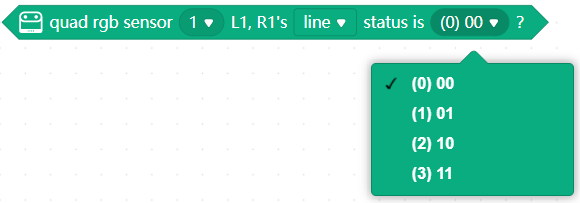
| 1a: 初階 | 要確定Quad RGB 感測器是否檢測到特定的線路狀態:
獲取檢測到的線路狀態:
| |
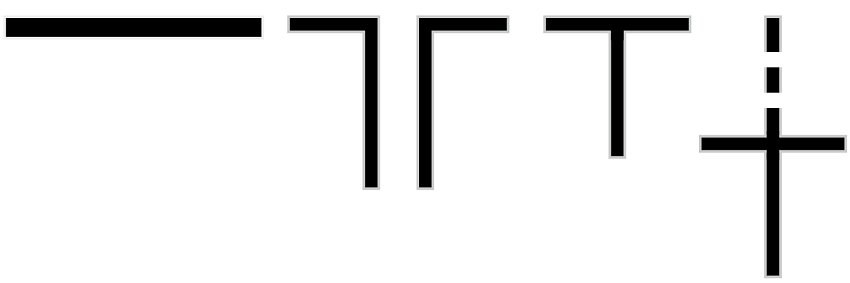
| 1b: 中階 | 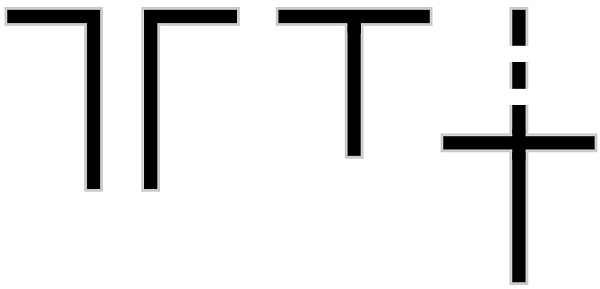 檢測交叉口:
| 四路 RGB 感測器無法忽略線,因此無法確定 T 形是否實際上是交叉(“+”,實際線在 T 之後繼續…)。 這只能通過直接駛過 T 並檢查線路是否繼續來檢查。 |
| 1c: 進階 | 實行平滑的線追蹤: (偏差檢測)
| 檢查此積木的輸出值。 切換補光燈的顏色,確保機器人放在直線中間時輸出值為 0。 補光的顏色可能對輸出值有輕微影響。 |

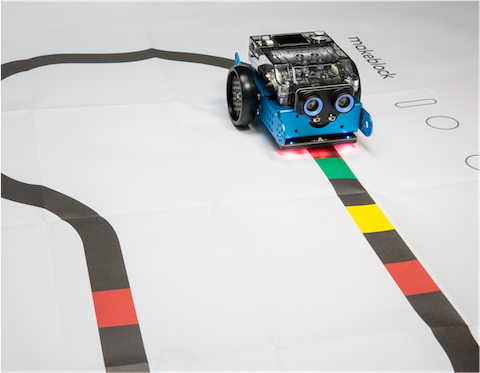
場景 2:有彩色部分的黑色線條 + 線條周圍的白色邊距 + 白色背景
例如:

推薦的目的積木與場景1相同,但需要特別準備。
可以使用以下任一方式:
- 對彩色部分中最亮的顏色進行基本校準,例如黃色,使所有較深的顏色都被識別為黑色。
- 對黑線進行基本校正,然後長按傳感器上的按鈕改變補光,看感測器是否將不同顏色的部分識別為要追踪的線。
○ 紅色部分:使用綠色或藍/白補光燈
○ 黃色部分:使用藍/白補光燈
○ 綠色和藍色部分:所有補光燈顏色都可
重要的是要知道:
如果您在 mBlock 5 上設置了補光燈的顏色,校正會重置補光燈(每個補光燈快速循環通過 r/g/b 照明)。
要跟隨的線內的彩色部分可能會影響進階、平滑的線追蹤(被識別為偏離線)。 例如,當對黃色進行基本校正時,藍色部分可能會被報告為偏差,即使它是 100% 在線上。
場景3:單色線+線邊白邊+白底
例如:

對Quad RGB 感測器進行基本校正,使其能夠識別線條和背景。
推薦的用途和積木與場景一相同。
注意:
如果您使用偏差積木,長按Quad RGB 感測器上的按鈕來切換補光燈的顏色,以確保當您將機器人放在線的中間時輸出值為 0。
當線條和背景之間的對比度較低時,不建議使用偏差積木。
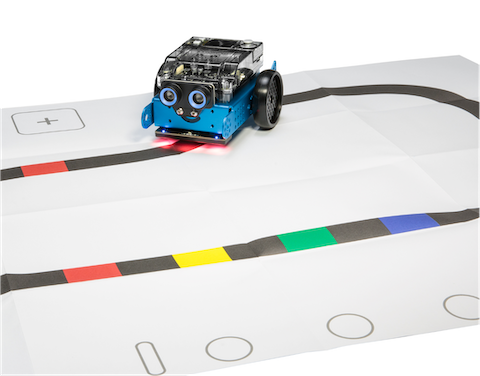
場景 4:黑線 + 線周圍的白邊 + 彩色背景/插圖
例如:

對Quad RGB 感測器進行基本校正,使其能夠識別線條和背景。
| 等級 | 推薦的積木 | 備註 |
| 4a: 初階 | 要確定Quad RGB 感測器是否檢測到特定的線路狀態:
獲取檢測到的線路狀態:
| |
| 4b: 中階 | 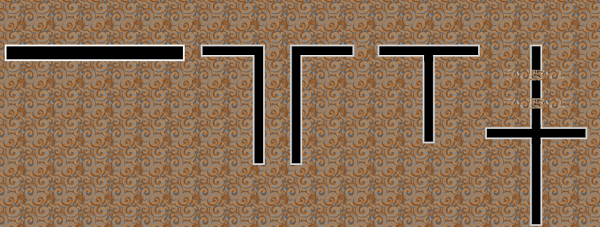 檢測交叉口: 檢測交叉口:
| 根據光照條件,外部區域(背景)可能被識別為要遵循的線。 發生這種情況時,您可以只使用 L1 和 R1 光感測器來檢測線條,或者確保線條周圍的白邊足夠寬,以防止感測器檢測到外部背景。 |
| 4c: 進階 | 實行平滑的線追蹤: (偏差檢測)
| 如果外部區域的顏色與要追踪的線的顏色足夠接近,則可能會影響偏差積木的輸出值,從而可能會導致線追踪失敗。 在這種情況下,長按Quad RGB 感測器上的按鈕以更改補光燈的顏色,確保識別出線條和背景之間的差異。 當您將機器人劃過線時,藍色 LED 會交替打開和關閉。
如果您使用偏差積木,請切換補光燈的顏色,以確保當機器人放在線的中間時輸出值為 0。 補光的顏色可能對輸出值有很大的影響。 |
場景5:黑線+單色線邊距+白底
例如:

對Quad RGB 感測器進行基本校正,使其能夠識別線條和背景。
推薦的積木與場景1的1a相同。不推薦交叉和偏差檢測,因為線周圍的邊緣可能被L2或R2識別為要遵循的線。
▼購買mBot: