開始使用
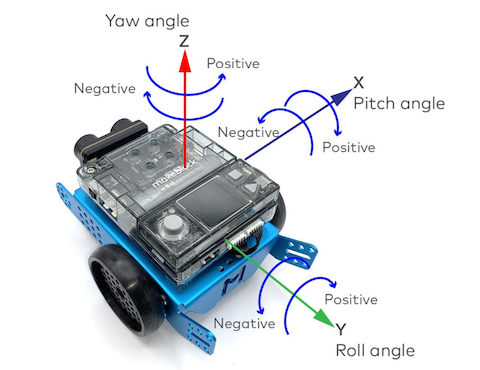
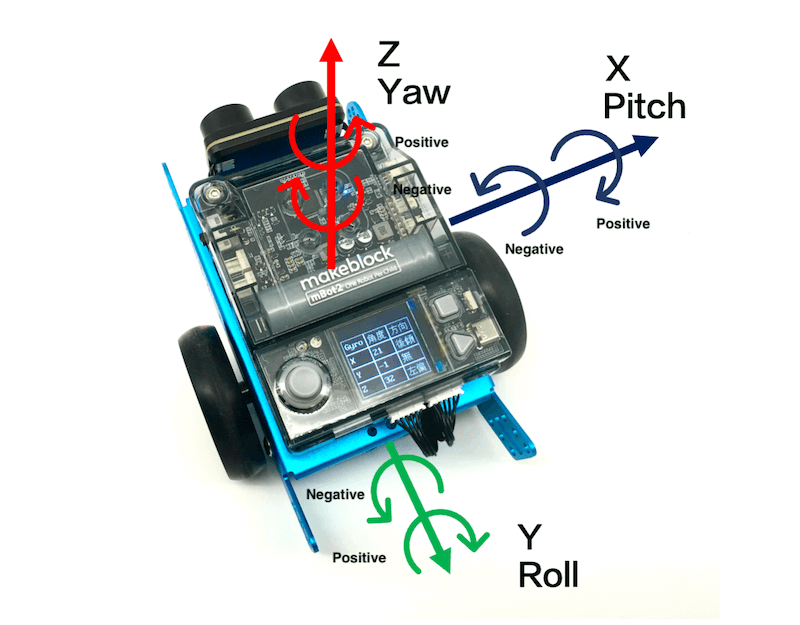
六軸指的是陀螺儀加上加速度計而這兩種結合形成了慣性測量單元。
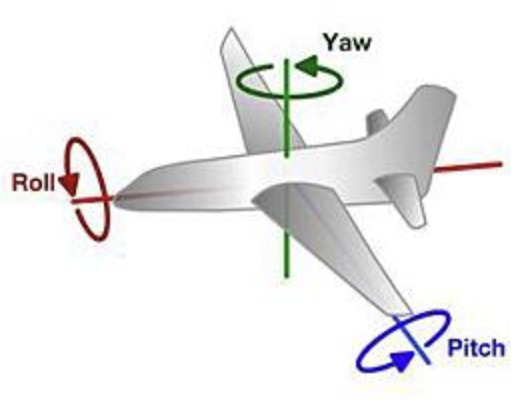
陀螺儀(gyroscope): 是一種基於角動量守恆的理論,用來感測與維持方向的裝置。陀螺儀多用於導航、定位等系統。
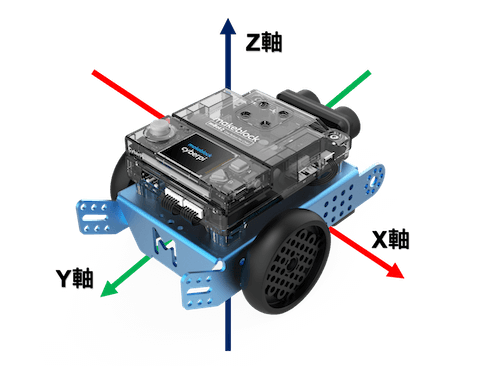
加速度計(accelerometer): 透過測量的元件在某個軸向的受力大小、狀況來得到數值,也就是三軸運動的情況,三軸加速度計可以量測X、Y、Z三個方向。
慣性測量單元(Inertial measurement unit): 一個IMU內會裝有陀螺儀和加速度計,來測量物體在三維空間中的角速度和加速度,並以此解算出物體的姿態。為了提高可靠性,還可以為配備更多的感測器。應用多用於,導航、飛機、飛彈、機器人等設備。
開始編程
(1) 將編程模式設置為上傳。

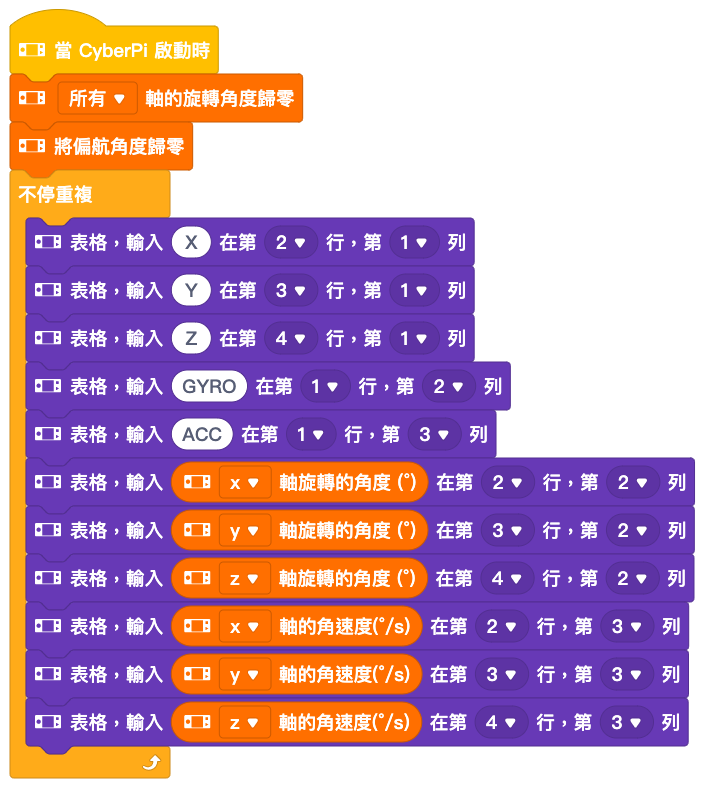
(2) 編寫程式
- 啟動後將IMU初始化,並Calibration方位。
- 設置螢幕Layout格式。
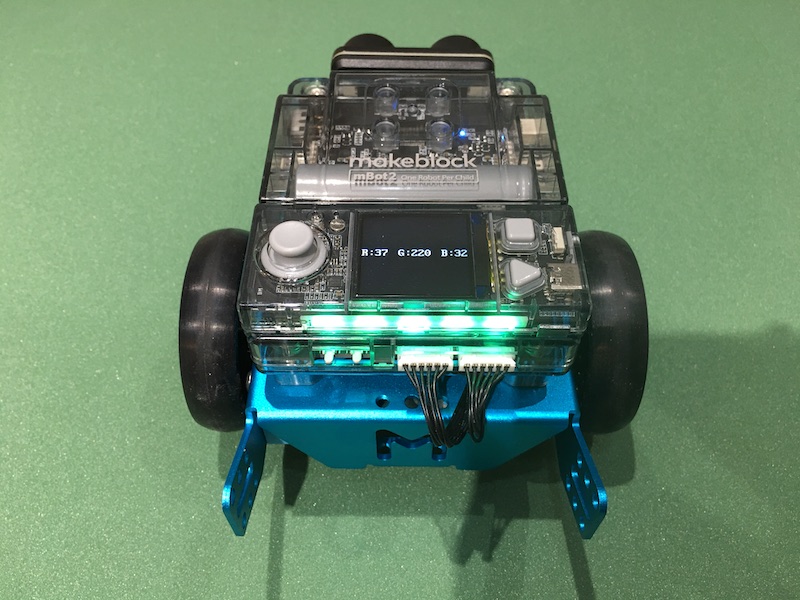
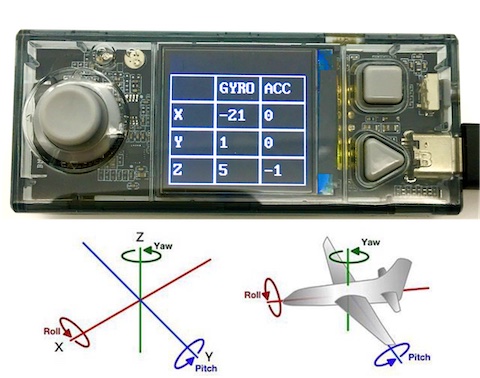
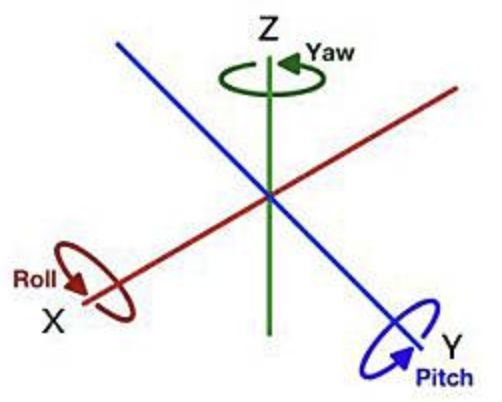
- 將陀螺儀和加速度計讀取值顯示於螢幕。
(3) 上傳程式

上傳完畢後,將CyberPi翻轉不同角度,並試看看翻轉時的力度,是否有什麼不同呢?
▼購買mBot2: