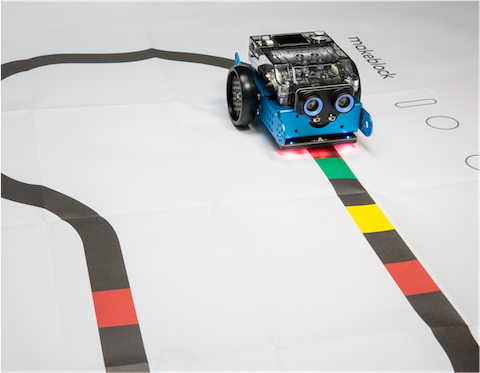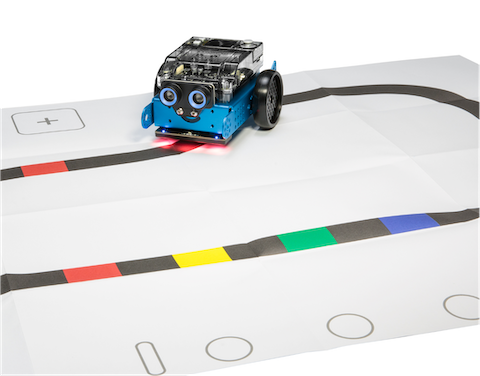
透過光反射原理當光感測器接收到不同光線時會有不同的對應的值,我們就可以應用於循線,以產品所附的地圖來說,循線是黑線所以光會被吸收,線徑的寬較小所以只需要用到L1、R1。
對應表格如下:
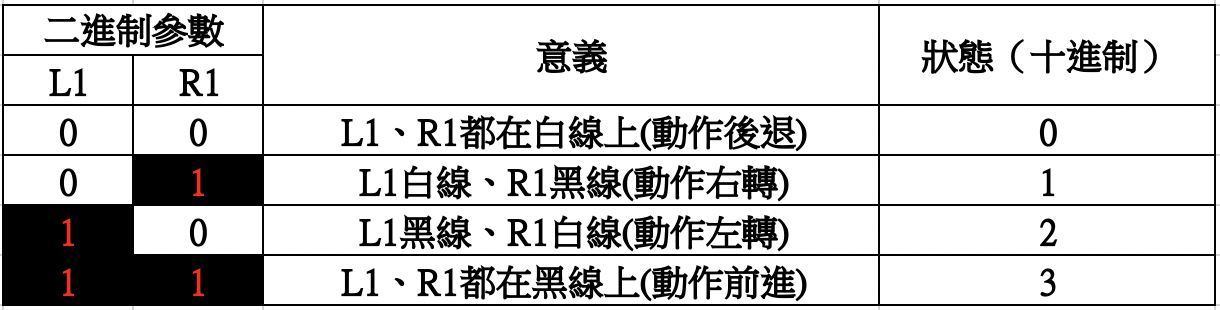
注意:若循線的線徑較寬需要用到L2、L1、R1、R2來使用。
在前面文章介紹四路循線感測器的規格及如何校正詳細文章請參考:請點我。
開始編程
(1)擴充mbot2 功能,點選”延伸集+”。

(2)點選”設備擴展” -> 點選”下載圖示” -> 點選”+添加”。

(3) 將編程模式設置為上傳。

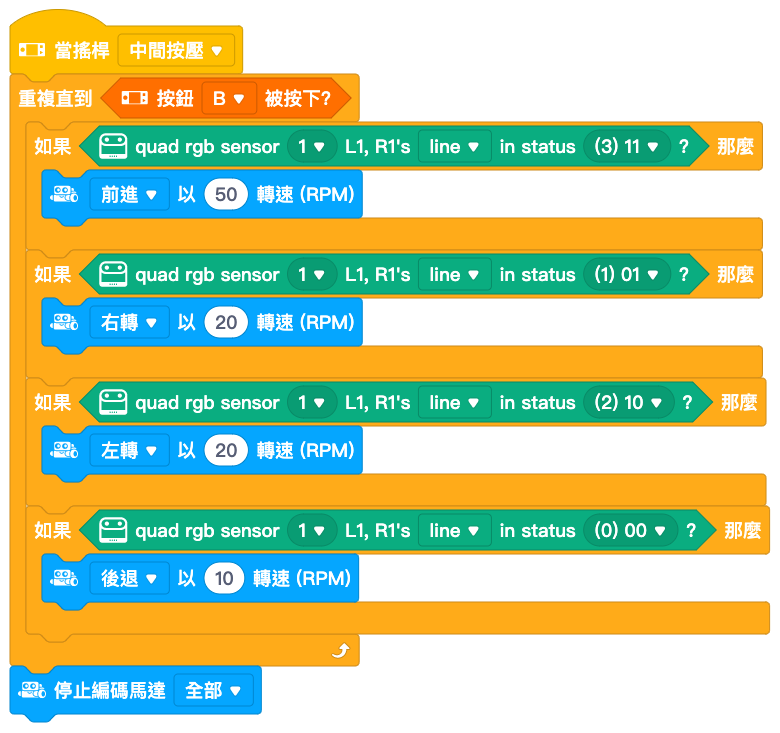
Mbot2延黑線做循線功能。
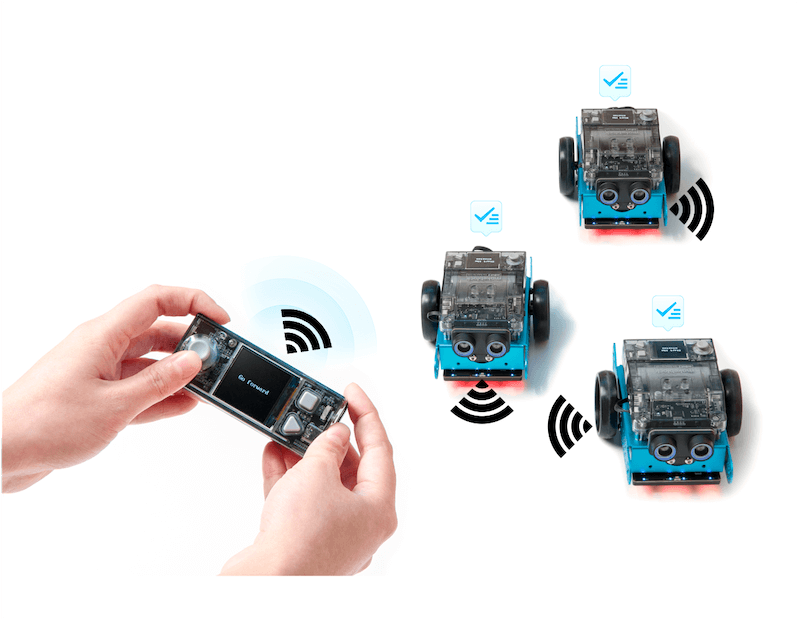
- 搖桿中間按壓啟動循線模式,按下按鍵B所有馬達停止移動。
(5) 上傳程式

▼購買mBot2: