【mBot Neo(mBot2)】第九篇:機器人持續加速度前進
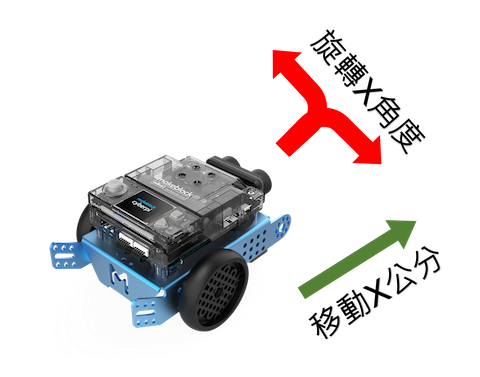
在前一篇中我們了解並學習編碼馬達的特性及控制,此篇我們透過程式來控制馬達RPM並讓小車持續加速。
RPM: Revolution(s) Per Minute,是一種來計算轉速的單位,一分鍾旋轉的圈數...

180 光學編碼馬達配備了光學編碼器,可實現高精度控制,通過它們的旋轉、速度和位置進行精確控制,從而使數學、物理和工程原理的集成。可靈活搭配其他各種零件使用。 它使用的材料降低了噪音並保證了大的輸出扭矩。

使用人工智慧的語音辨識功能,來製作有趣的玩法,CyberPi板上集成麥克風功能,我們對者CyberPi 說出指定關鍵句,CyberPi判斷成功也回應您相關語句。
使用 CyberPi 創建一個有趣的遊戲,玩家搖動 CyberPi 十秒鐘。對遊戲進行編程,記錄震動強度大於 50 的次數,震動強度大於50加1分,次數越多得分越高。
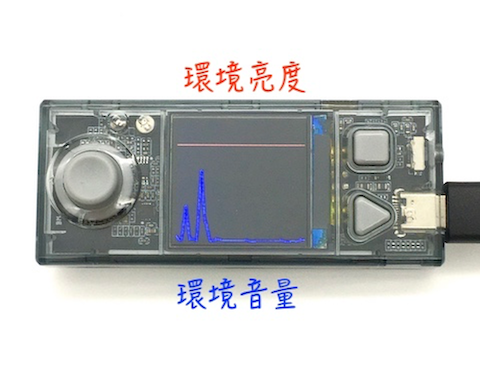
利用 CyberPi 上的板載感測器如何讀取周圍環境的音量和環境光強度。 將了解感測器值的數據表示和圖形顯示在CypberPi的螢幕上。
在 mBlock 中結合設備編程和舞台編程,將 CyberPi 變成一個遊戲控制器。 將檢查程式以了解 CyberPi 如何控制角色的移動。 然後,透過編程,將修改現有遊戲以編寫 CyberPi 遊戲控制器。

透過結合揚聲器、麥克風和存儲裝置,將 CyberPi 轉變為袖珍型錄音機和播放設備,透過啟發後可自行修改程一個功能豐富的錄音機項目。
©2024 Copyrights 米羅科技文創學院 All Rights Reserved | 網站系統建置 By SGI
