
【商品說明】
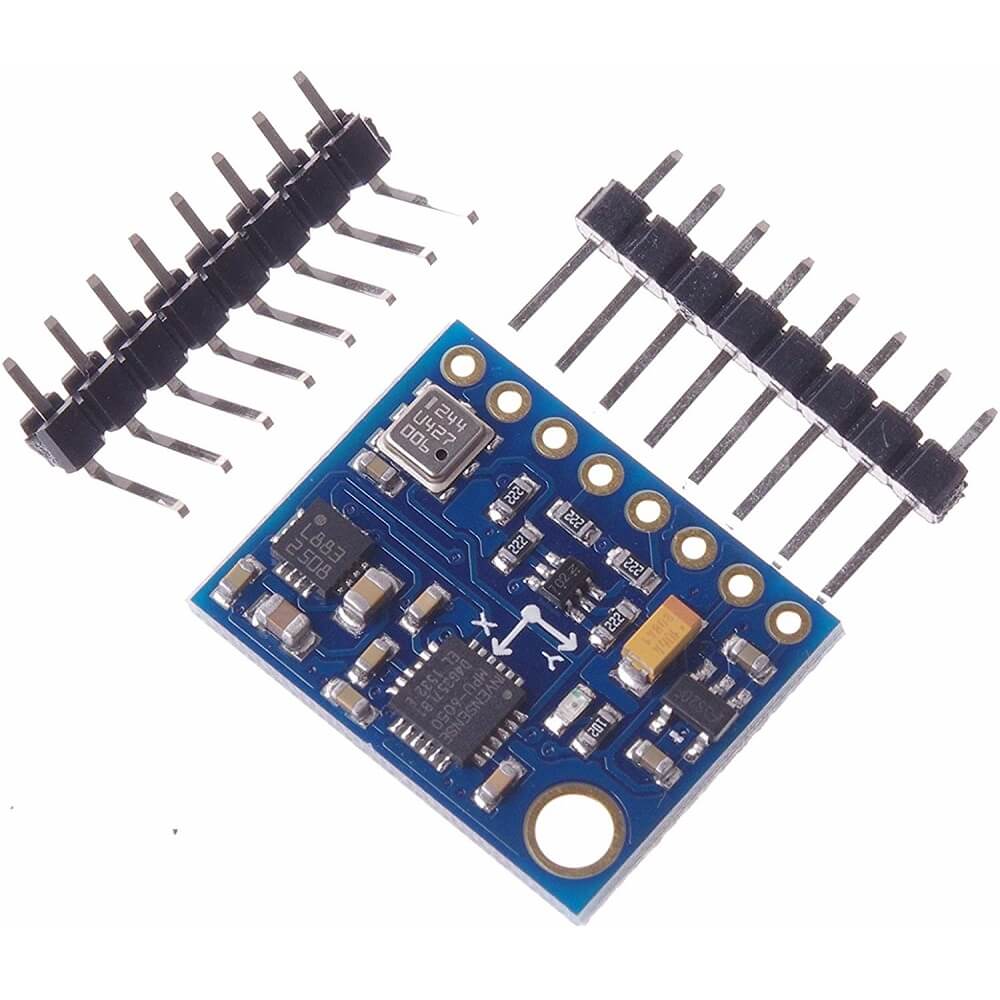
MPU-6000為全球首例整合性6軸運動處理組件,相較於多組件方案,免除了組合陀螺儀與加速器時之軸間差的問題,減少了大量的包裝空間。 MPU-6000整合了3軸陀螺儀、3軸加速器,並含可藉由第二個I2C端口連接其他廠牌之加速器、磁力傳感器、或其他傳感器的數位運動處理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以單一數據流的形式,向應用端輸出完整的9軸融合演算技術,IMU六軸慣性導航 (Accelerometer + Gyro)。
InvenSense的運動處理資料庫,可處理運動感測的複雜數據,降低了運動處理運算對操作系統的負荷,並為應用開發提供架構化的API。
MPU-6000的角速度全格感測範圍為±250、±500、±1000與±2000°/sec (dps),可準確追緃快速與慢速動作,並且,用戶可程式控制的加速器全格感測範圍為±2g、±4g±8g與±16g。產品傳輸可透過最高至400kHz的I2C或最高達20MHz的SPI。
MPU-6000可在不同電壓下工作,VDD供電電壓介為2.5V±5%、3.0V±5%或3.3V±5%,邏輯接口VVDIO供電為1.8V± 5%。 MPU-6000的包裝尺寸4x4x0.9mm(QFN),在業界是革命性的尺寸。其他的特徵包含內建的溫度感測器、包含在運作環境中僅有±1%變動的振盪器。
【產品規格】
- 使用晶片:MPU-6050
- 供電電源:3-5V(內部低壓差穩壓)
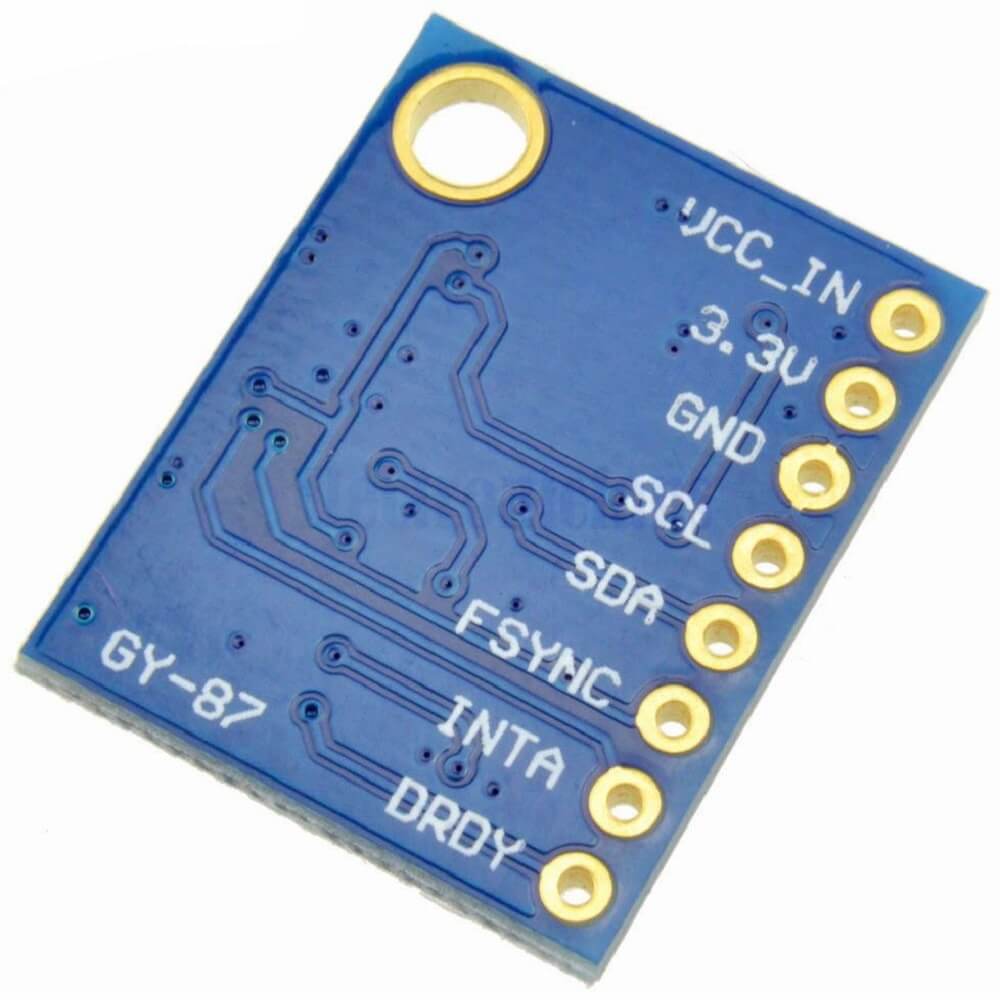
- 通信方式:標準IIC通信協定
- 晶片內置16bit AD轉換器,16位元資料輸出
- 陀螺儀範圍::±250 500 1000 2000 °/s
- 加速度範圍:±2±4±8±16g
- 採用沉金PCB,機器焊接工藝保證品質
- 引腳間距2.54mm
【產品特性】
- 以數位輸出6軸或9軸的旋轉矩陣、四元數(quaternion)、歐拉角格式(Euler Angle forma)的融合演算數據。
- 具有131 LSBs/°/sec 敏感度與全格感測範圍為±250、±500、±1000與±2000°/sec 的3軸角速度感測器(陀螺儀)。
- 可程式控制,且程式控制範圍為±2g、±4g、±8g和±16g的3軸加速器。
- 移除加速器與陀螺儀軸間敏感度,降低設定給予的影響與感測器的飄移。
- 數字運動處理(DMP: Digital Motion Processing)引擎可減少複雜的融合演算數據、感測器同步化、姿勢感應等的負荷。
- 運動處理數據庫支持Android、Linux與Windows
- 內建之運作時間偏差與磁力感測器校正演算技術,免除了客戶須另外進行校正的需求。
- 以數位輸出的溫度傳感器
- 以數位輸入的同步引腳(Sync pin)支援視頻電子影相穩定技術與GPS
- 可程式控制的中斷(interrupt)支援姿勢識別、搖攝、畫面放大縮小、滾動、快速下降中斷、high-G中斷、零動作感應、觸擊感應、搖動感應功能。
- VDD供電電壓為2.5V±5%、3.0V±5%、3.3V±5%;VDDIO為1.8V± 5%
- 陀螺儀運作電流:5mA,陀螺儀待命電流:5A;加速器運作電流:350A,加速器省電模式電流: 20A@10Hz
- 高達400kHz快速模式的I2C,或最高至20MHz的SPI串行主機接口(serial host interface)
- 內建頻率產生器在所有溫度範圍(full temperature range)僅有±1%頻率變化。
- 使用者親自測試 10,000 g 碰撞容忍度
- 為可攜式產品量身訂作的最小最薄包裝 (4x4x0.9mm QFN)