【mBot Neo(mBot2)】第八篇:馬達精準控制、前進X公分、旋轉X角度
180 光學編碼馬達配備了光學編碼器,可實現高精度控制,通過它們的旋轉、速度和位置進行精確控制,從而使數學、物理和工程原理的集成。可靈活搭配其他各種零件使用。 它使用的材料降低了噪音並保證了大的輸出扭矩。
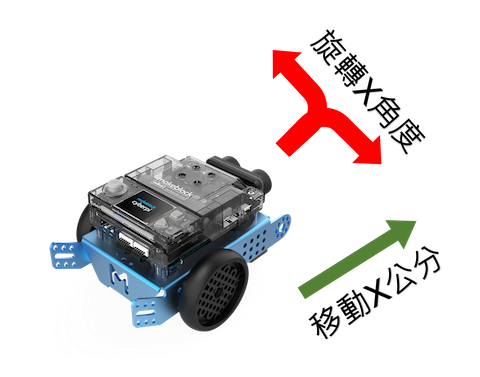
180 光學編碼馬達配備了光學編碼器,可實現高精度控制,通過它們的旋轉、速度和位置進行精確控制,從而使數學、物理和工程原理的集成。可靈活搭配其他各種零件使用。 它使用的材料降低了噪音並保證了大的輸出扭矩。
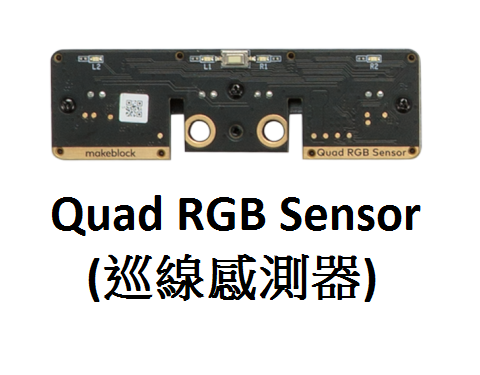
四路 RGB 感測器使用可見光作為補光,顯著降低了環境光的干擾。 此外,它還提供了識別顏色的功能。 新的環境光校正功能還減少了環境光對線路跟隨的干擾。 擁有四個光感器,可以支援更多的編程場景。


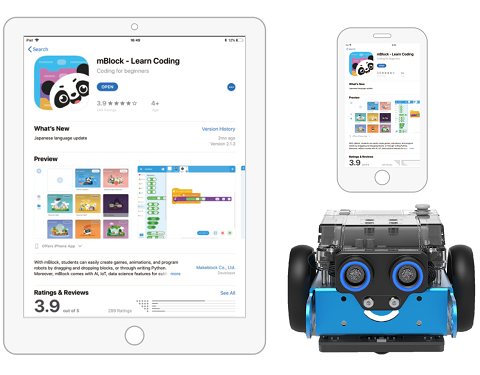
介紹如何使用手機或平板電腦上的 mBlock5 替 mBot2 編寫簡單的避障程式。本頁介紹的設備為平板電腦,同樣可以在智慧型手機上使用mBlock 5 APP。
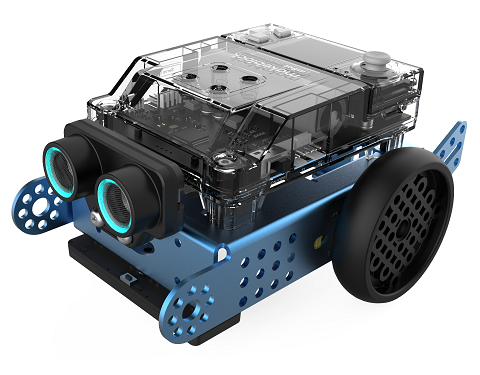
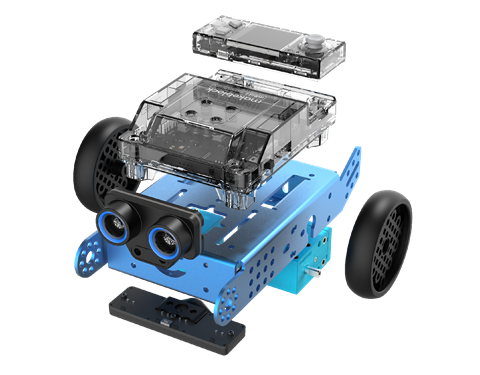
mBot2 Shield 配備內置可充電鋰電池,可為 CyberPi 供電。 透過多功能、伺服馬達和馬達端口,它可以驅動馬達、伺服馬達和 LED 燈條。
©2026 Copyrights 米羅科技文創學院 All Rights Reserved | 網站系統建置 By SGI