【商品說明】
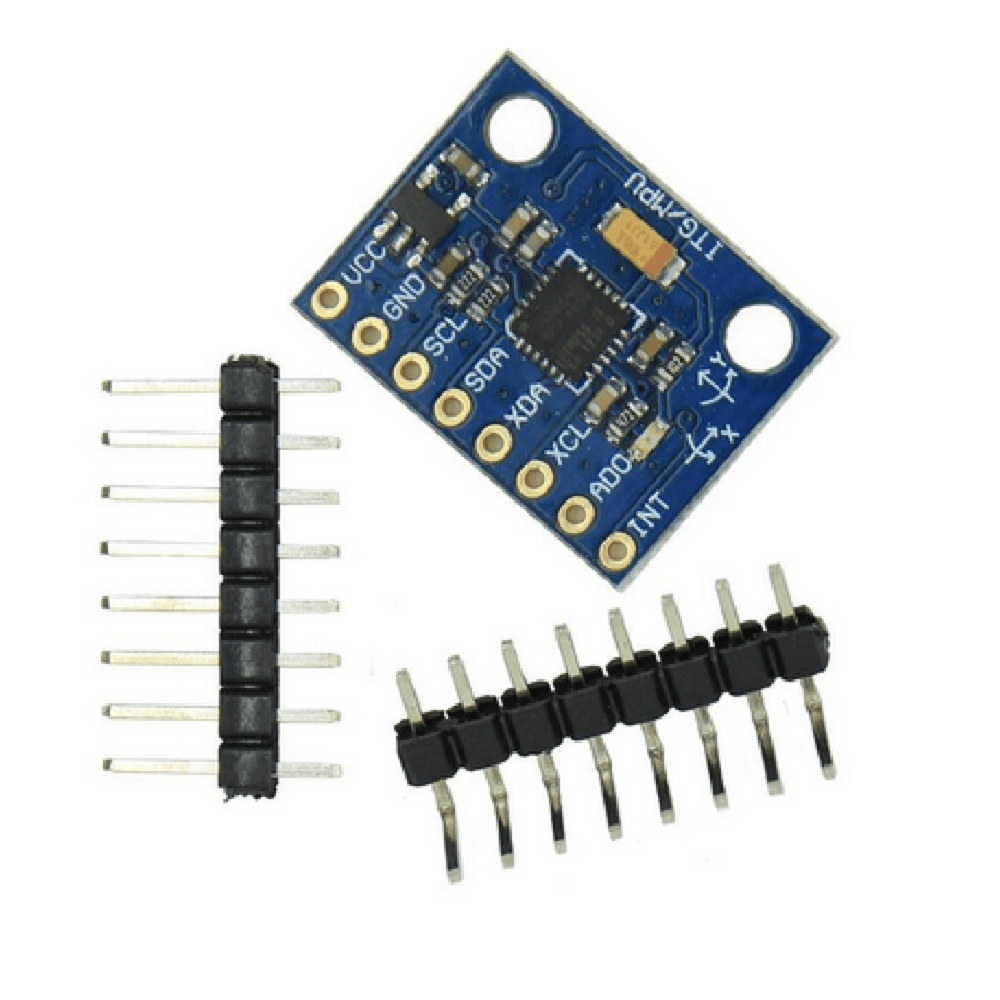
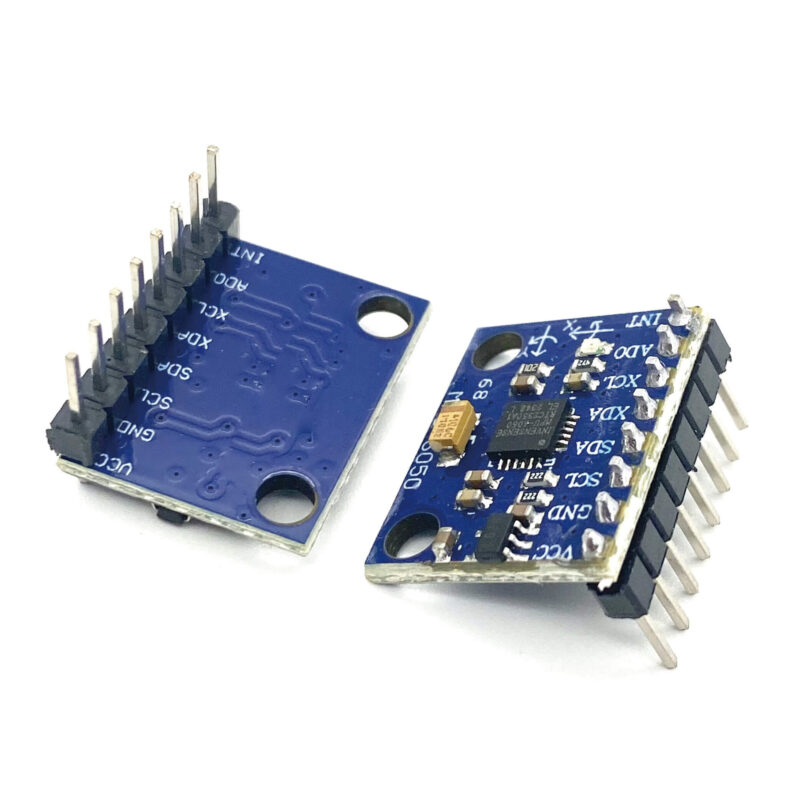
AHRS IMU感測器測量 3 軸角度、角速度、加速度。它的強項在於能夠準確計算X、Y軸角度的算法。
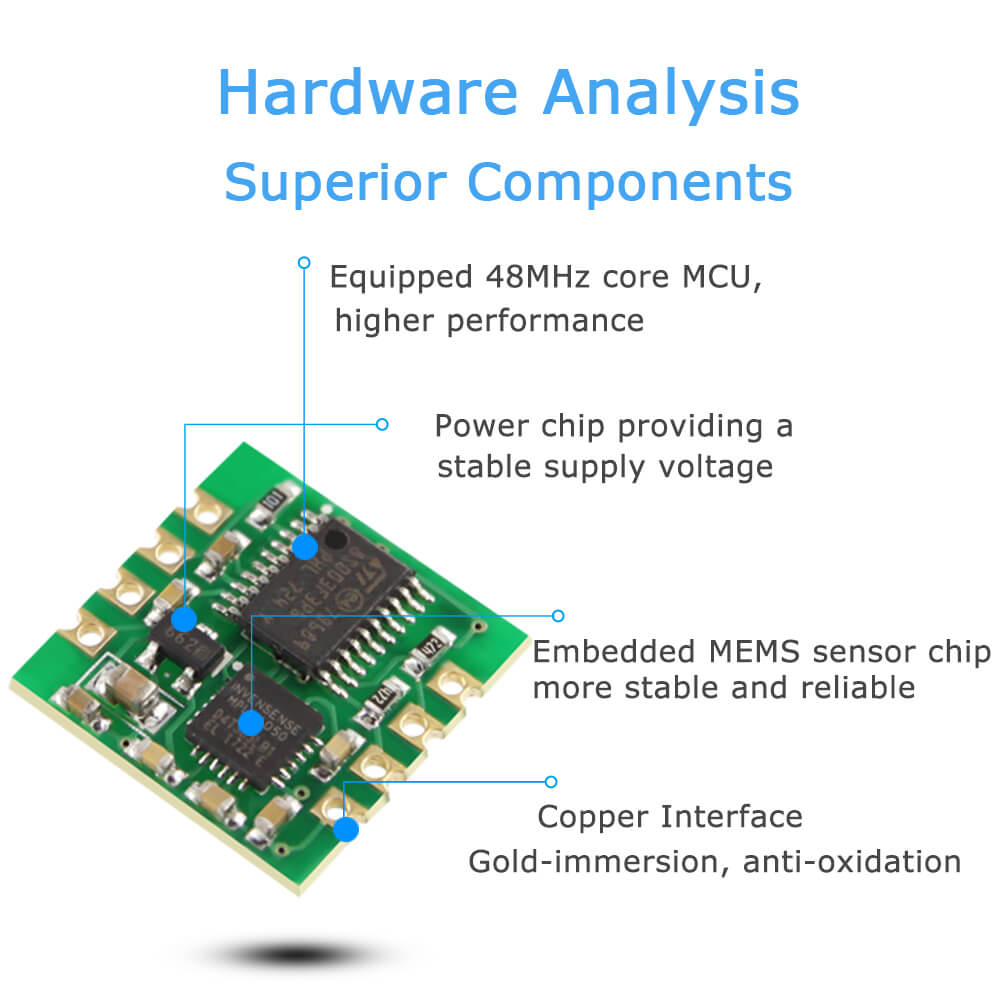
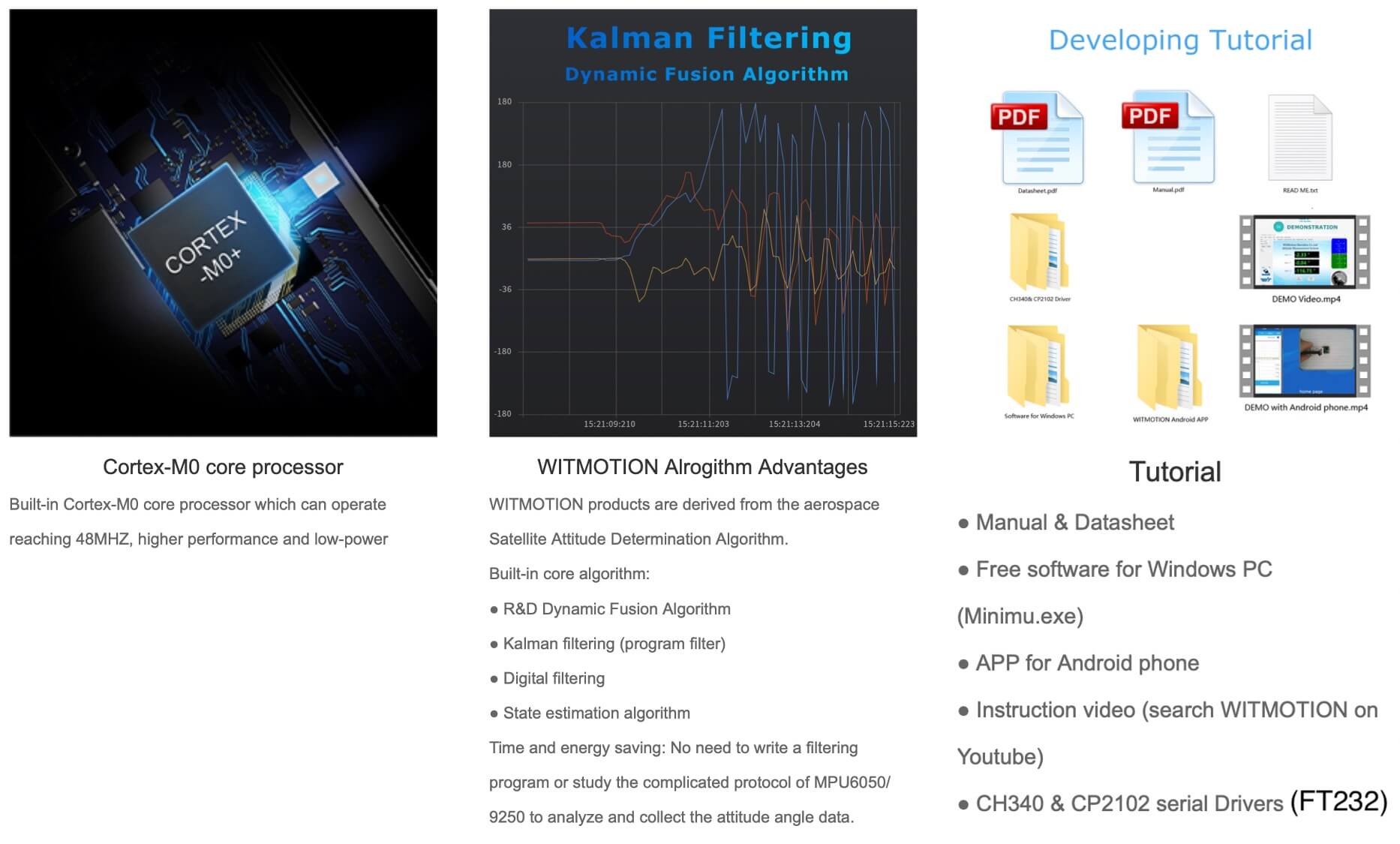
MPU6050結合STM32 MCU晶片內存Kalman filter 卡爾曼濾波演算法,追求最佳數據準確性和穩定性:專利的零偏差自動檢測校準算法和研發動態融合算法優於傳統加速度計感測器。
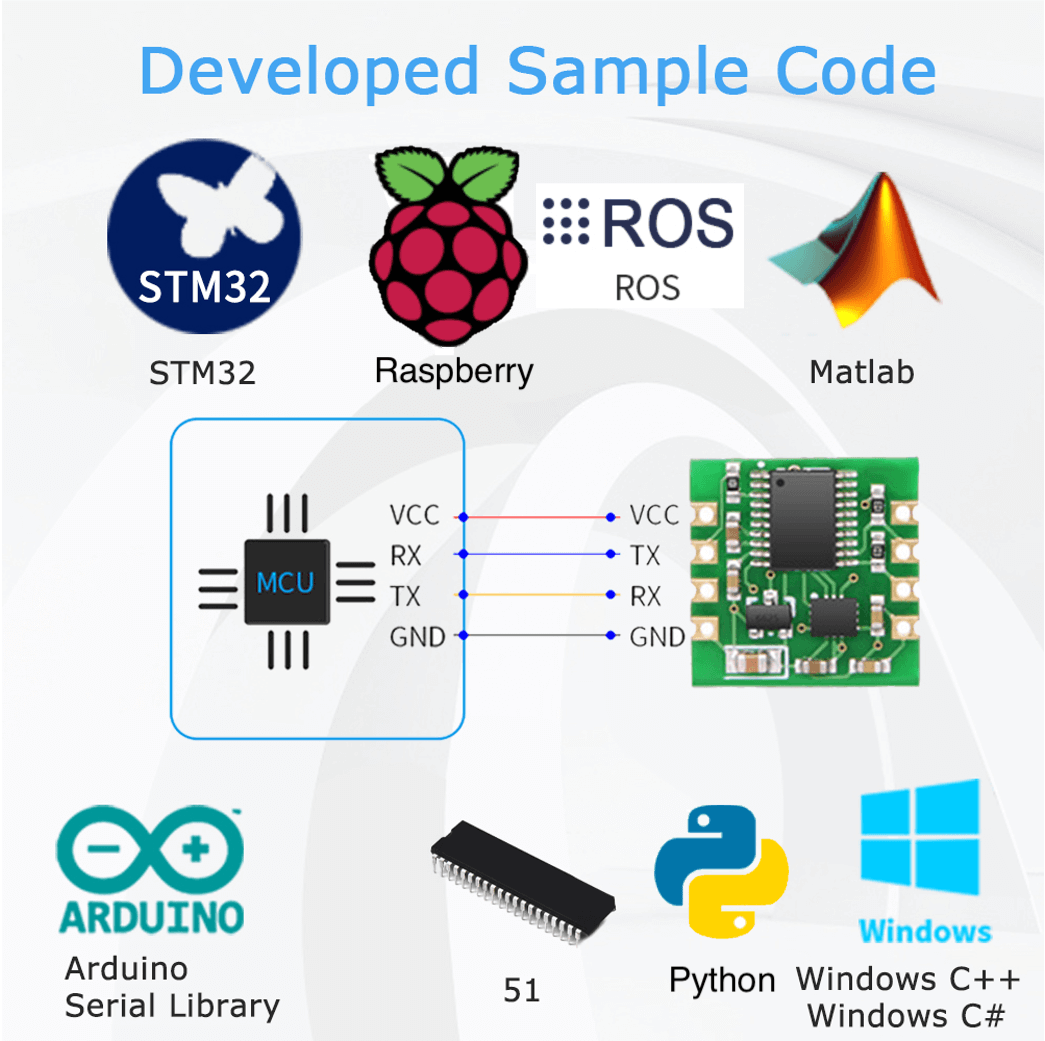
支援任何MCU及PC、Android都適用,如:Arduino 、STM32、8051、Raspberry、Nvidia jetson nano、PC、Android。
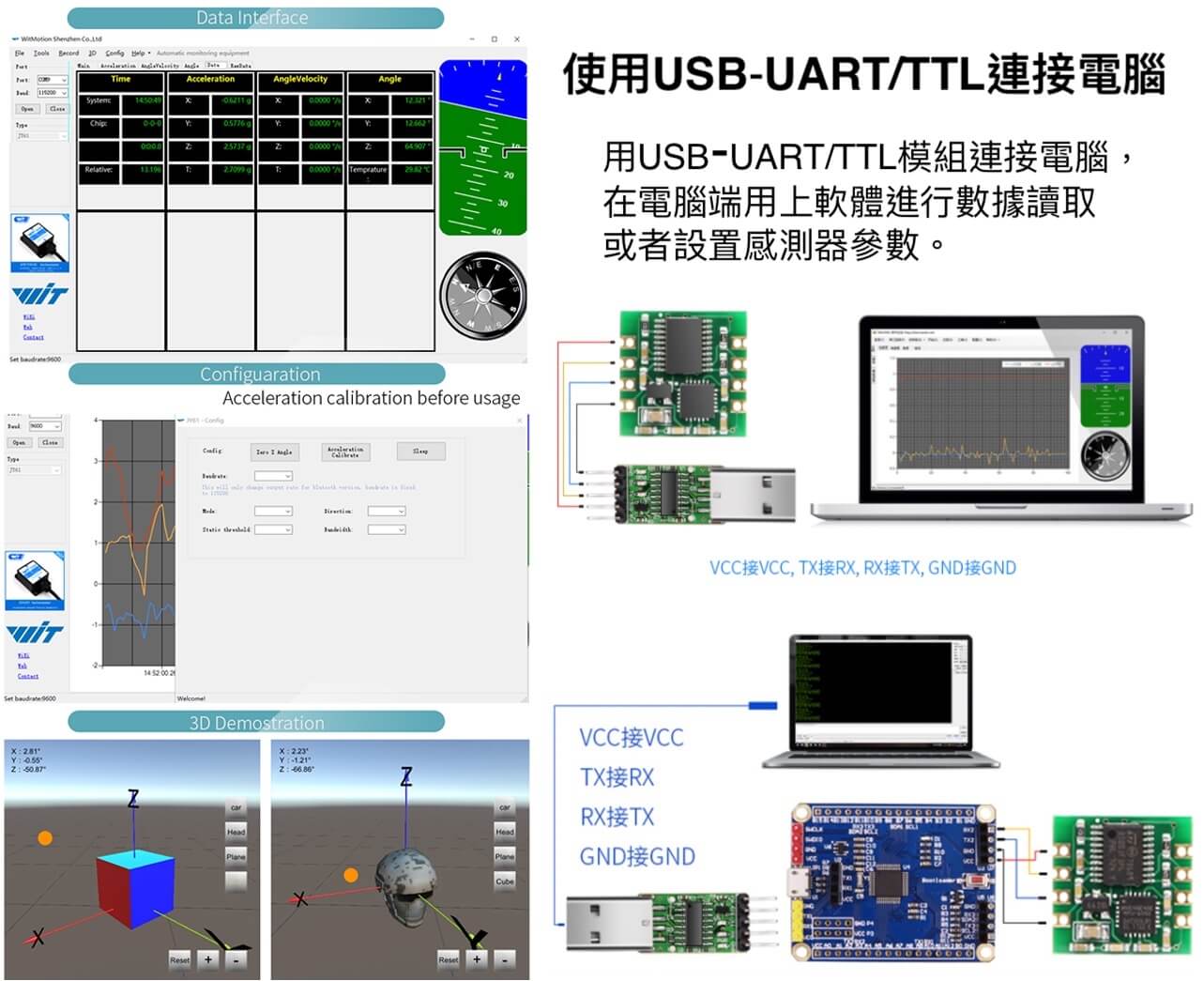
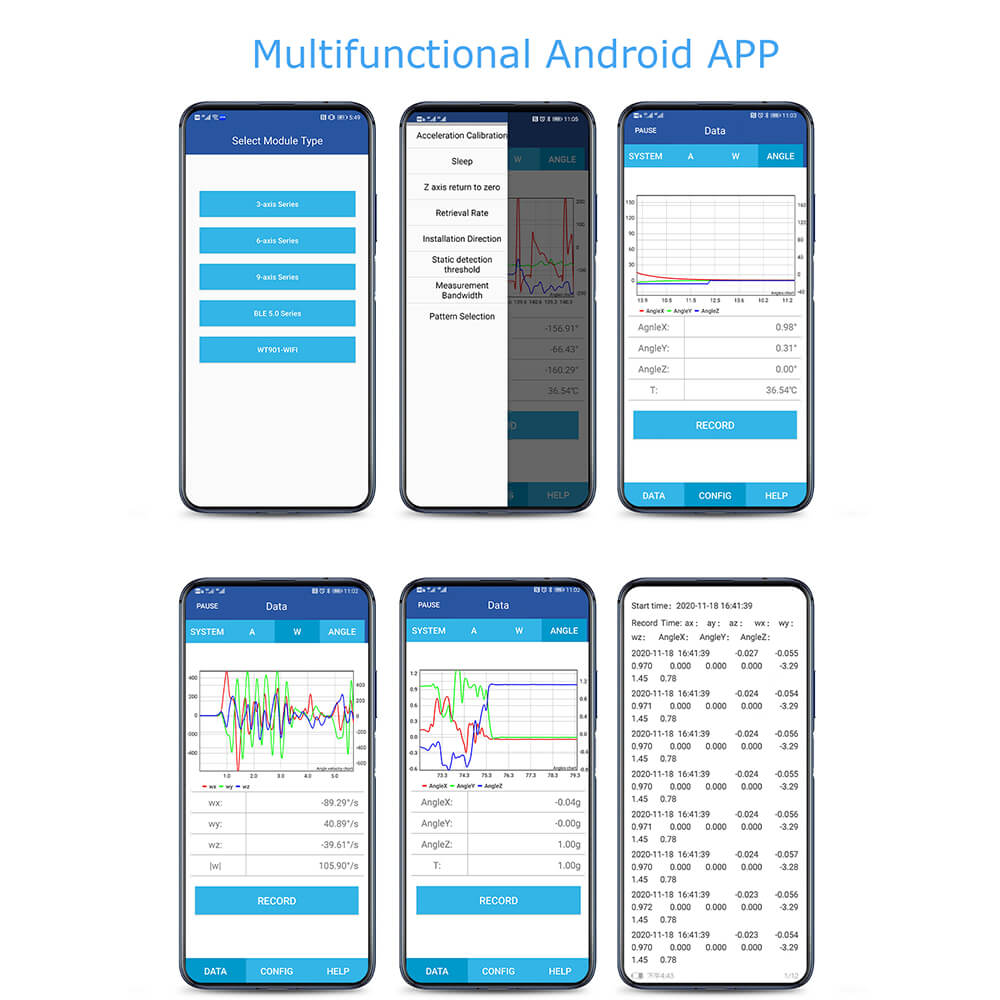
不並擔心如何使用,提供大量資料及使用工具。
【產品特性】
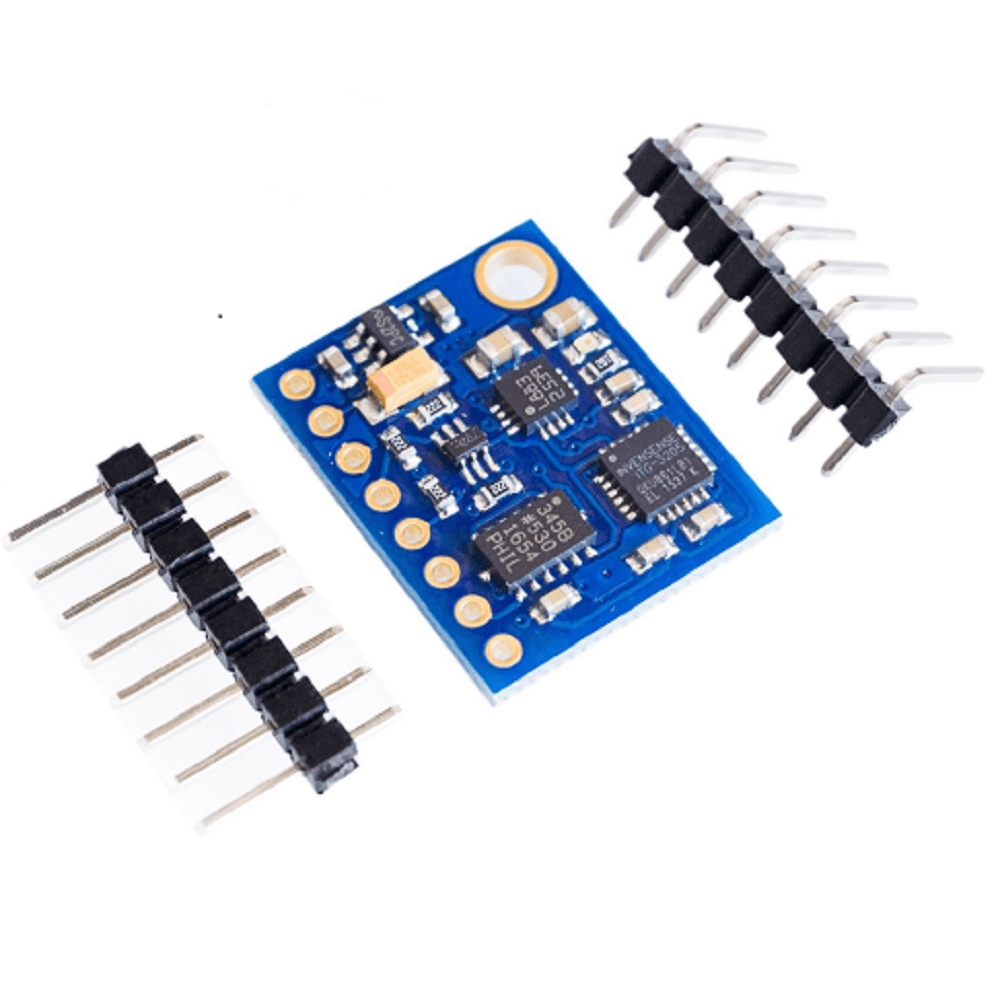
- 【高性能】堅如磐石的數據輸出:3軸XYZ(Pitch Roll Yaw)加速度+陀螺+角度,測量範圍和輸出速率(0.2-100Hz)可選。
- 【穩健設計】 Cortex-M0核心處理器、高度集成的MEMS和卡爾曼算法相結合,提供0.05度(X,Y軸)的測量精度,體積小,接口多樣,專業用於客戶集成項目。
- 【優勢】8年專業姿態測量解決方案提供商,感測器集成研發動態融合算法和卡爾曼濾波,確保數據輸出穩定和出色的偏置穩定性,低噪聲水平,提高測量精度。
- 【無憂支援】提供使用工具及大量資料。
【產品規格】
- 電流:<10mA
- 電壓:3.3-5V(需要3.3-5V的電源)
- 數據輸出頻率:20Hz / 100Hz
- Baud Rate:9200 / 115200
- 輸出內容:3軸加速度+角度+角速度
- 範圍:加速度(±6g),陀螺儀(±2000°/s),角度(X,Z軸:±180°,Y±90°)
- 解析率:加速度(0.005g),陀螺儀(0.61°/s)
- 角度精度(校准後):X,Y軸:0.05°(靜態),X,Y軸:0.1°(動態)
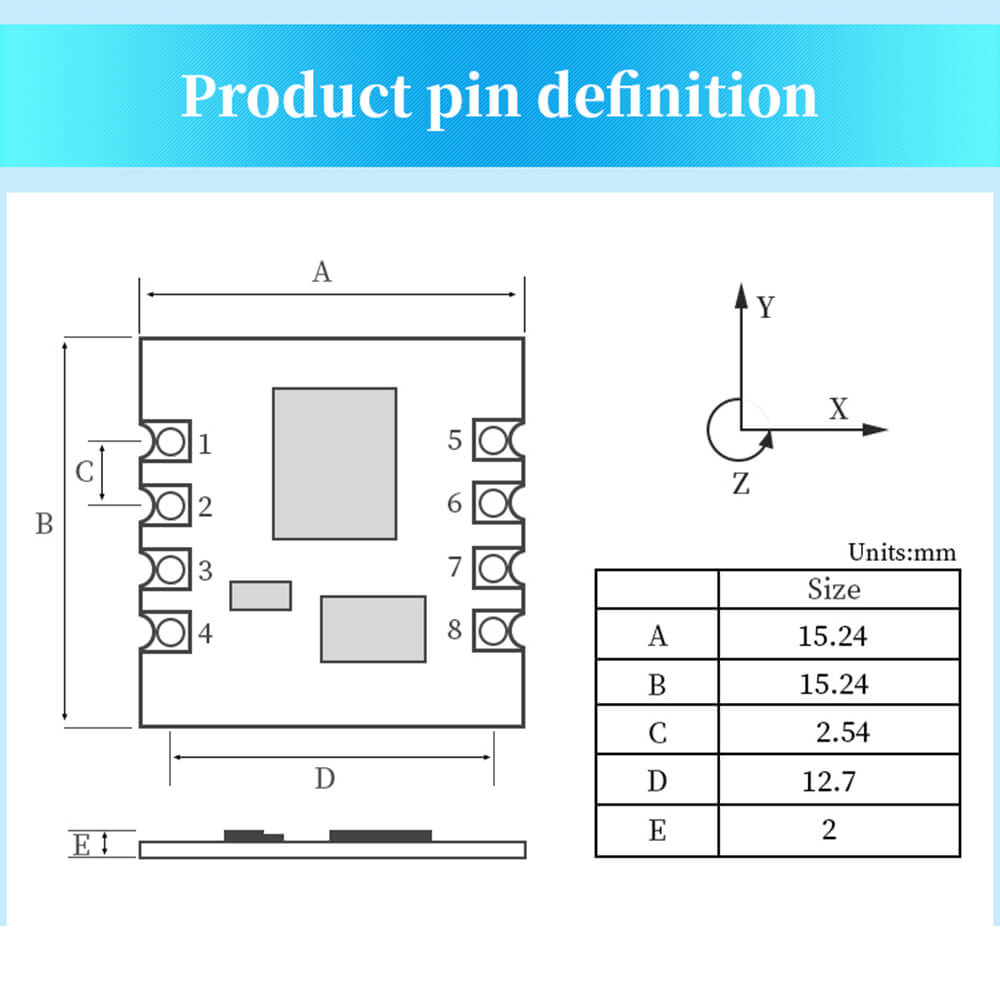
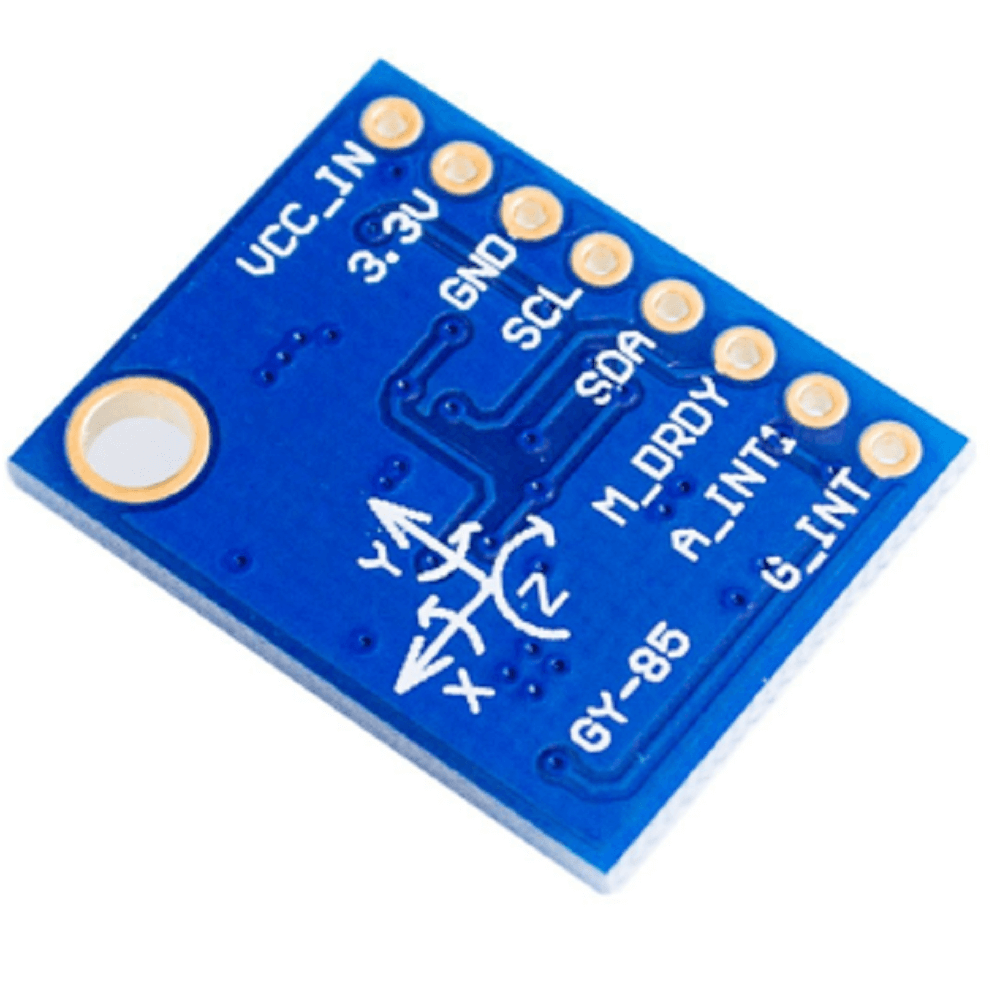
- 尺寸: 15.24mm*15.24mm*2mm
注意:因為Z軸角度是通過陀螺儀計算和分析的。 移動時Z軸角度會隨時間累積誤差。 需要校準。