【商品說明】
如何自己DIY一輛Mini平衡車?
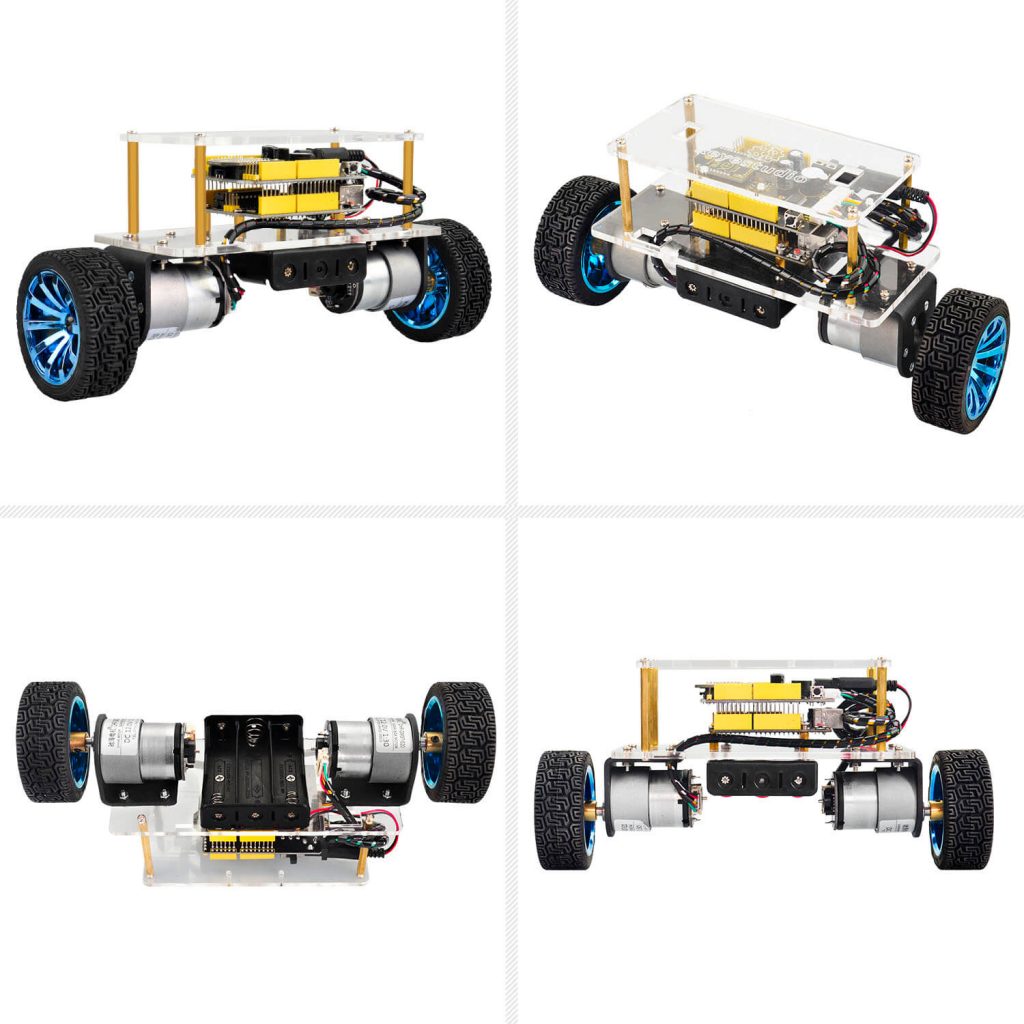
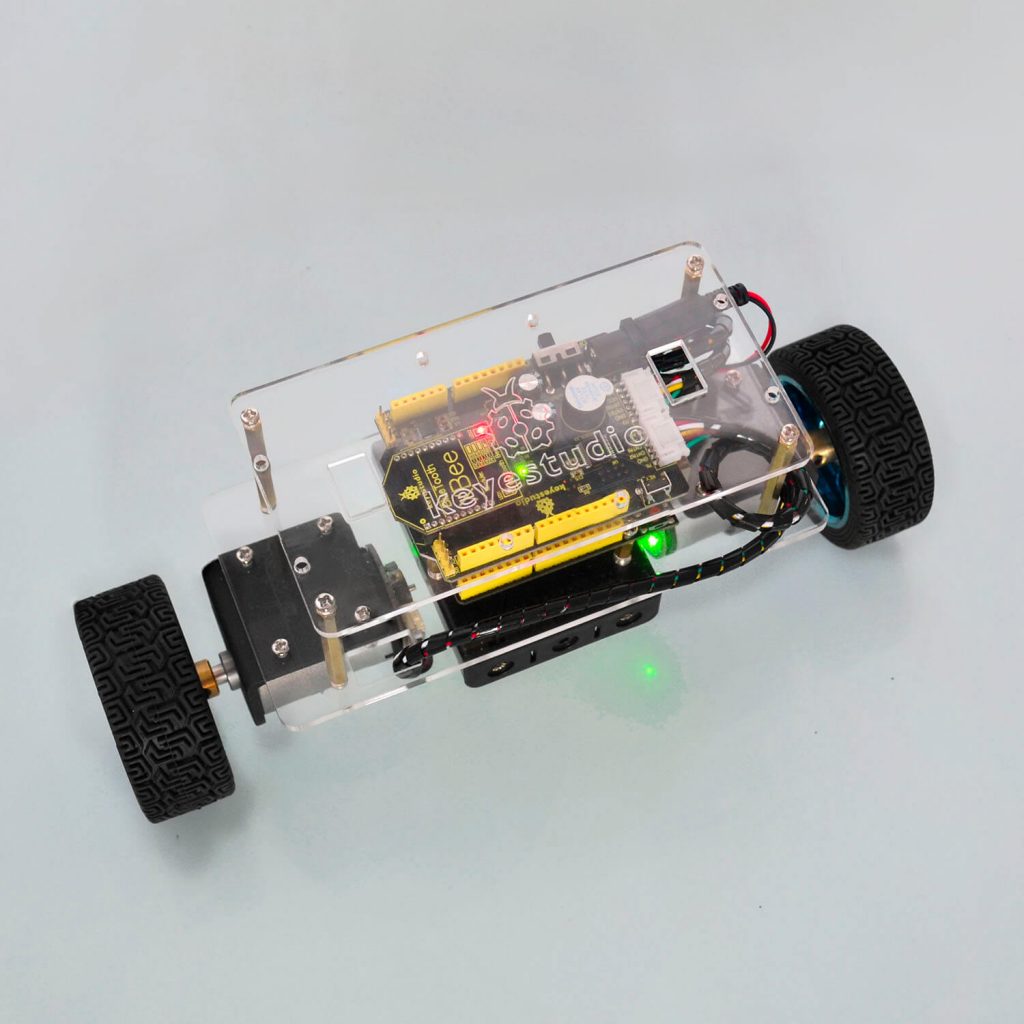
這款平衡車套件基於 Arduino 開發平台。 我們主要使用REV4作為核心,平衡車內置MPU-6050作為驅動板來測試車身姿態。
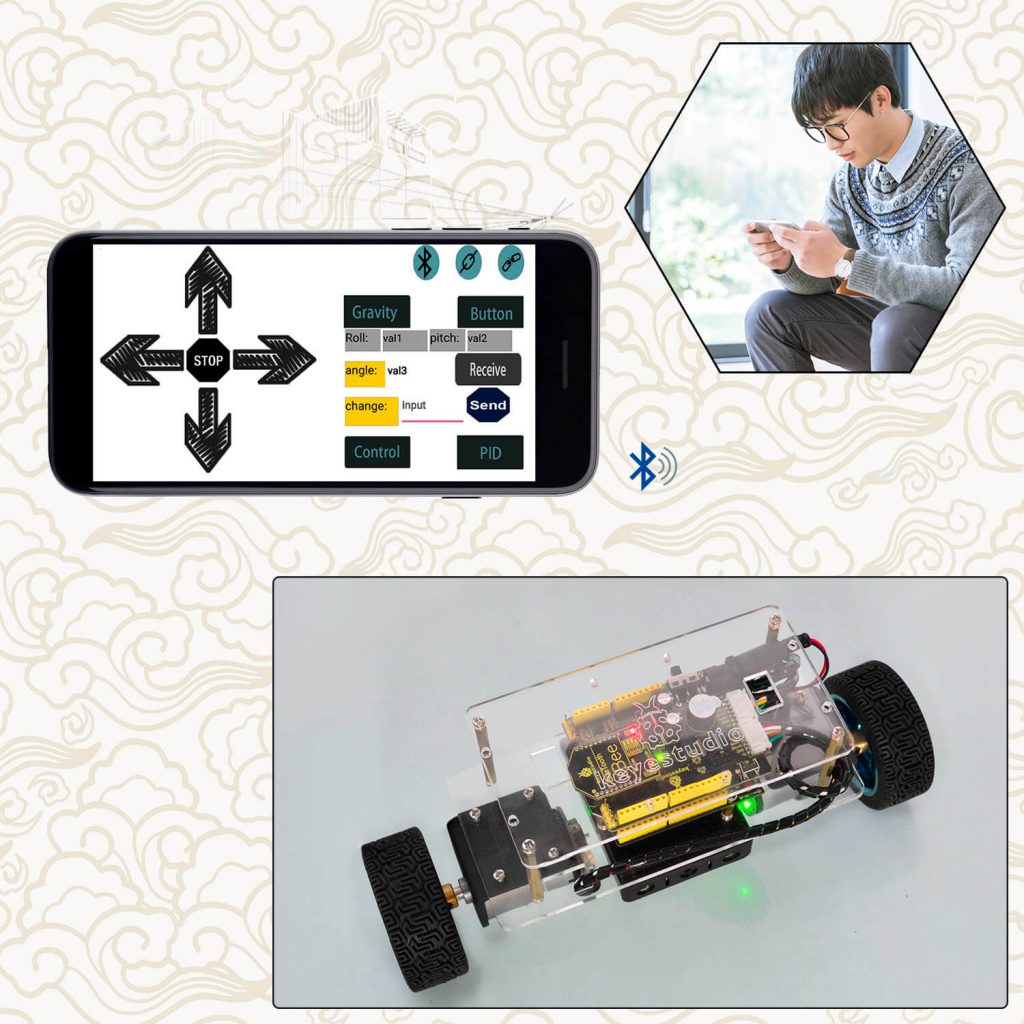
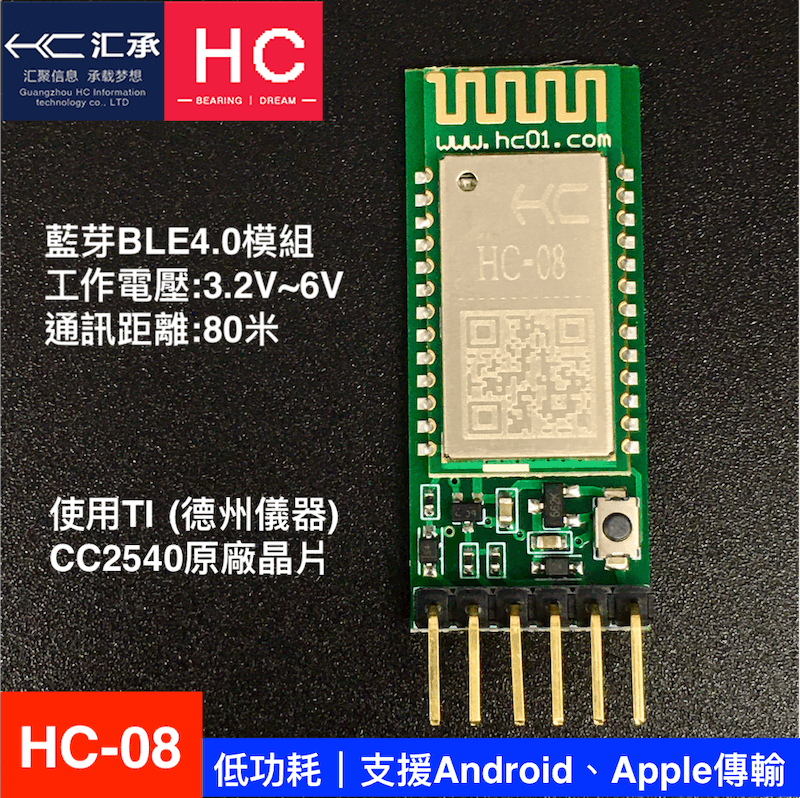
平衡車有藍牙接口,完全兼容藍牙XBee模組(僅兼容安卓系統)。
連接藍牙後,您可以通過藍牙APP輕鬆控制平衡車的移動方向,做出各種獨特的姿勢。
為方便操作控制,藍牙APP有按鍵和重力兩種控制方式。
此外,還增加了調整平衡角和PID參數的功能,讓您可以完美的調整和控制平衡車。
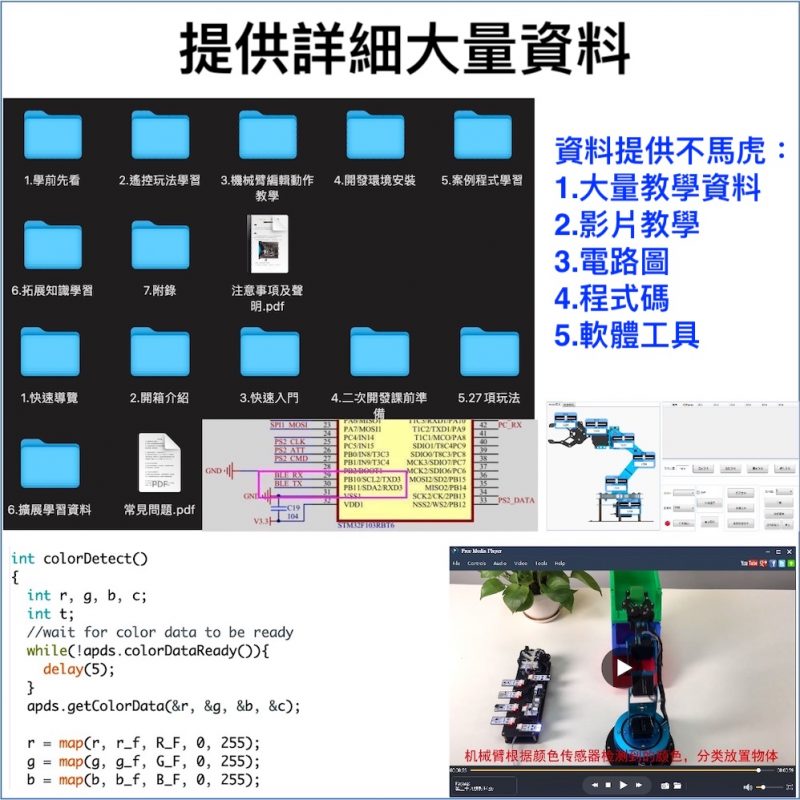
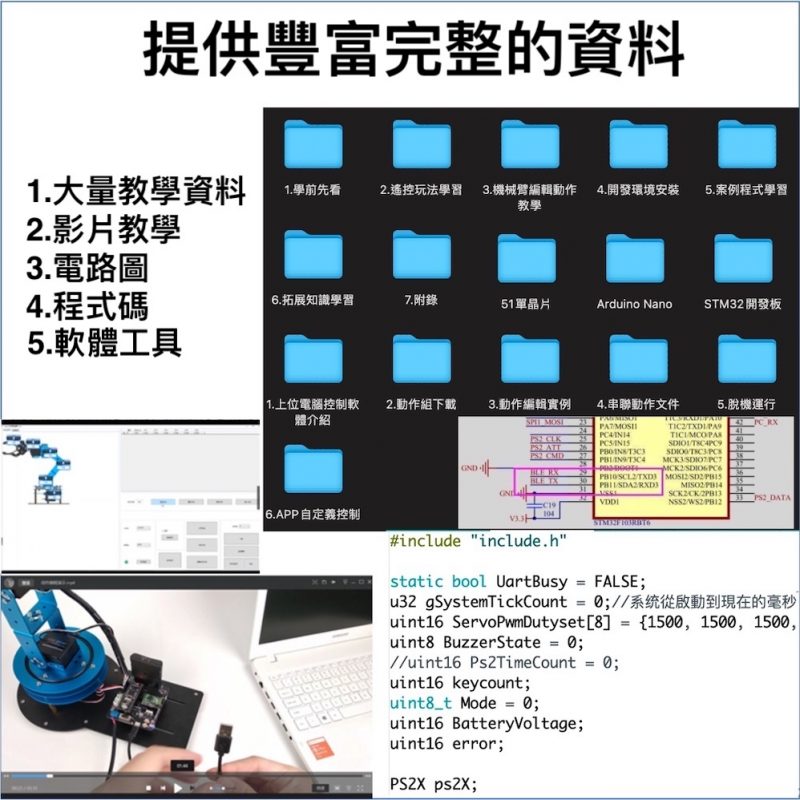
不用擔心怎麼玩。 我們可以為您提供所有的組裝部件,以及相應的安裝、調試方法和程式。
【工作原理】
自我平衡車是利用車身的動力來保持相對平衡,這是一個動態平衡的過程。
維持汽車平衡的動力來自車輪的運動,由兩個直流電機驅動。
車身的控制可分為以下三個控制任務:
1、平衡控制:透過控制小車車輪的正反轉,使車子保持直立和平衡。
2、速度控制:透過控制小車的傾角實現前後移動和速度控制。事實上,它最終是通過控制馬達的速度來實現的。
3、方向控制:透過控制汽車兩個馬達的轉速差來實現轉向控制。
這樣,理解三個控制任務就比較簡單了。
但在最終的控制過程中,總結為對一個控制量的控制。所以這三個任務之間會有耦合,會互相干擾。
關鍵是控制小車的平衡;速度和方向控制應盡可能平穩。